В МФТИ разработали эффективную систему радарной ориентации для беспилотных автомобилей
RadarSFEMOS определила расположение и движение объектов с большой точностью в дождь, снег и туман. До сих пор беспилотные машины тяжело справляются с вождением в таких условиях, и без решения этой проблемы их массовое применение проблематично. Новую технологию со временем планируют внедрить на отечественных фурах и такси.

Сегодня в мире есть два подхода к беспилотным авто — Tesla и всех остальных. Первый полагается на вождение исключительно по данным камер: нейросеть для этого обучается на вождении обычных людей, которые, как известно, смотрят на дорогу только в видимом диапазоне. Альтернативный подход опирается на дополнительные сенсорные системы. Чаще всего это лидары, дающие подробную 3D-картину дорожной обстановки.
Однако это решение весьма проблематично. Дело не только в том, что набор лидаров все еще стоит как бюджетное авто, но и в качественных недостатках. В частности, в туман и снег видимость для них падает примерно до нулевой. Человек все еще может что-то разобрать на дороге, а беспилотное авто с лидаром в таких условиях встанет. Другая сложность: поскольку люди-водители лишены лидаров, обучать нейросети использованию лидарных данных сложно, выборки малы, отчего часты галлюцинации. Так называют ситуации, когда нейросеть видит на дороге то, чего там нет, и предпринимает, например, фантомное торможение, то есть тормозит на пустой дороге, рискуя тем, что в машину под ее управлением въедут сзади.
Некоторые научные группы считают радары более разумной альтернативой. В отличие от лидаров, радарное излучение дает картинку и в непогоду, водяные капли относительно слабо поглощают радиоволны. Но поскольку их длина больше, чем у лидарного излучения, то данные от них меньшего разрешения, более разреженные. Кроме того, сигналы радаров в реальных дорожных условиях сталкиваются со множеством шумов, артефактов и нулем радиозаметной разметки на дорожном полотне. А без нее сложно обучать нейросети, способные управлять машиной, опираясь на радар. ПО для таких систем намного сложнее в разработке, чем, собственно, «железо».
Поэтому ученые из МФТИ разработали новую самообучающуюся систему обработки данных 4D-радаров RadarSFEMOS. Статью об этом опубликовали в журнале IEEE Robotics and Automation Letters. От предшественников система отличается более эффективным шумоподавлением, а также повышенной способностью определять направление и скорость движения объектов в окружающей среде. Это важно, поскольку в норме для радиолокации тем сложнее заметить движущийся объект, чем ближе его скорость к самой машине, на которой установлен радар Определение направления при этом происходит без специальной разметки.
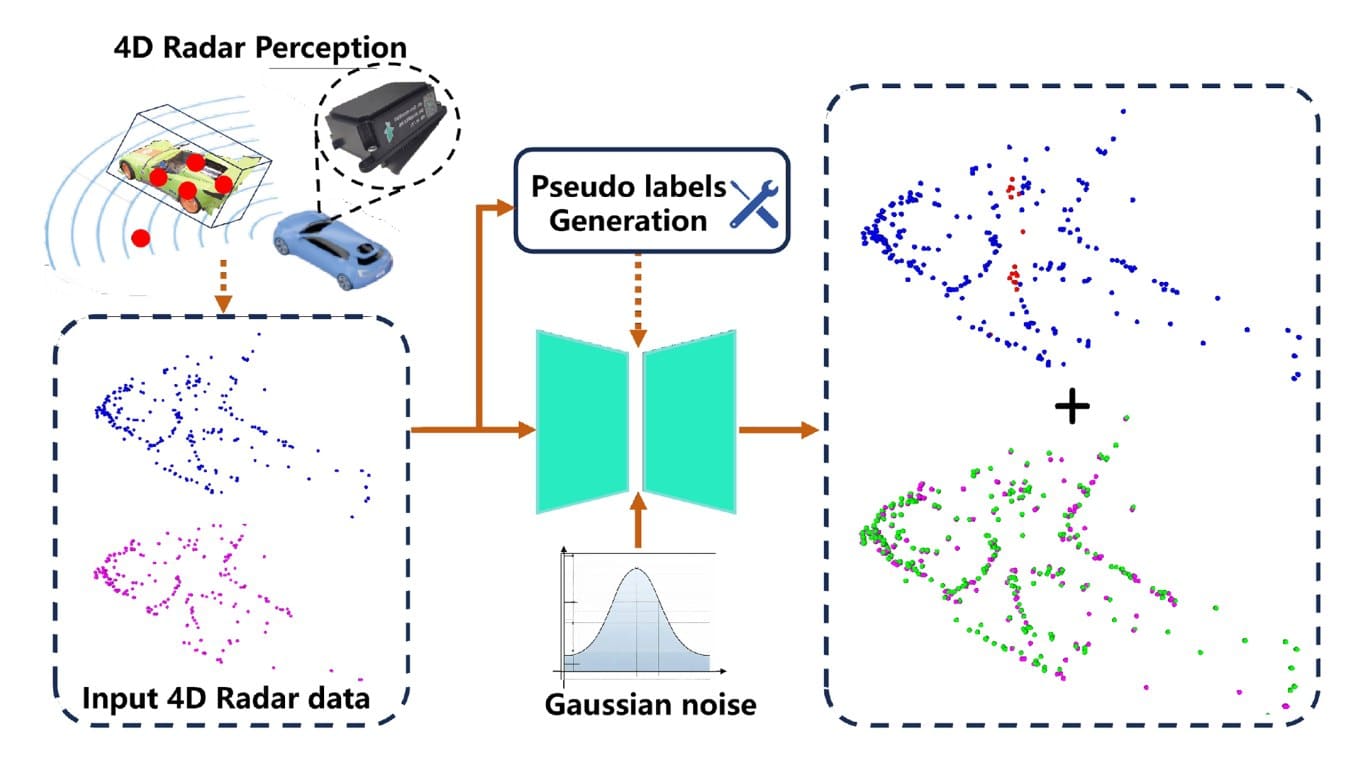
Для этого RadarSFEMOS применила диффузионную модель шумоподавления, очищающую радарные данные от шумов за миллисекунды. Чтобы идентифицировать предметы, окружающие радар, система применила трансформерный анализатор с адаптивной архитектурой. Это позволило различать объекты при всего 5-10 точках отражения радарных волн на квадратный метр проекции окружающих объектов. Лидарные системы на сегодня способны сделать это как минимум при сотне точек на квадратный метр.
Алгоритмы RadarSFEMOS также учитывает скорость своего автомобиля-носителя и вычитает его из скоростей окружающих объектов. 4D-радар научили измерять скорость движения объектов к автомобилю и от него. За счет внедрения ИИ система обучается без ручной разметки обучающего массива данных, постепенно «привыкая» отличать радарные шумы от реального движения и повышать точность своей работы.
«Наша система определяет движение объектов вокруг автомобиля и разделяет их на движущиеся и статичные, а также делает это в любых погодных условиях. Это как если бы беспилотник получил шестое чувство. Это не просто научная статья, алгоритм уже сегодня готов к работе на серийных радарах, которые в 50 раз дешевле лидаров», — описал итоги научной работы Степан Андреев, директор Научно-технического центра телекоммуникаций МФТИ.
Чтобы проверить способность RadarSFEMOS избегать фантомных торможений и иных реакций на несуществующие объекты, системы испытали на стандартных наборах данных View-of-Delft (VoD) и TJ4DRadSet. Число таких срабатываний упало в несколько раз, а точность определения положения объектов выросла до 89%.
 Telegram
Telegram  Дзен
Дзен Древнеримские инженеры проложили колоссальную сеть дорог через Европу, Северную Африку и Ближний Восток, многие участки которой до сих пор поражают безупречной прямолинейностью. Секрет строительства заключался в использовании трех особых геодезических инструментов, с помощью которых разбивали местность на ровные отрезки и размечали трассы.
Японские исследователи выловили у берегов Окинавы пластиковую бутылку с узким горлышком, внутри которой сидел большой живой краб. В итоге ученые смогли найти ответы на несколько возникших в связи с этой находкой вопросов: как краб попал в бутылку, сколько там находился и как ему удалось выжить?
В вакууме космоса два металлических предмета, прижатые друг к другу, могут спонтанно свариться без какого-либо нагрева. Из-за отсутствия кислорода на поверхностях деталей разрушается защитный слой, в результате чего свободные электроны начинают мгновенно перемещаться между ними и соединяют два элемента в один монолит.
Древнеримские инженеры проложили колоссальную сеть дорог через Европу, Северную Африку и Ближний Восток, многие участки которой до сих пор поражают безупречной прямолинейностью. Секрет строительства заключался в использовании трех особых геодезических инструментов, с помощью которых разбивали местность на ровные отрезки и размечали трассы.
Самый маленький дневной хищник Африки впервые попал под наблюдение с помощью GPS-трекеров. Ученые выяснили, что для выкармливания птенцов ему нужен участок почти в 14 раз меньше, чем у степной пустельги — ближайшего «рекордсмена» среди изученных птиц.
Терраформировать Марс — то есть превратить в мир, где можно жить без защитных куполов — мечта человечества с того момента, как стало понятно, что это холодная планета с призрачной бескислородной атмосферой. Сейчас главный хедлайнер ее освоения — Илон Маск, компания SpaceX которого планирует первые полеты туда уже в 2028 году. Многие энтузиасты вспоминают слова Маска 14-летней давности: Красную планету надо лишь «подремонтировать», чтобы ходить без скафандра. Но между полетом и прогулками по городу-саду на Марсе лежит огромная пропасть. Пару лет назад Naked Science рассматривал положительный сценарий терраформирования. Пришло время подсчитать, сколько же лет и ресурсов потребуется.
Хотя длительность помех не превышала десяти секунд, это первый известный случай такого рода. Обычно спутникам не хватает мощности для создания радиосигналов той силы, что нужна для подобных помех.
Вселенная может оказаться «замкнутой» глобальной структурой, где свет от далеких галактик способен возвращаться к наблюдателю с разных направлений. Именно такой сценарий не удалось исключить авторам нового масштабного обзора. Проверить его предсказания астрономы смогут уже в ближайшие годы.
Ученые впервые на молекулярном уровне доказали, что обычная вода одновременно состоит из двух разных жидких состояний — более плотного и менее плотного, которые непрерывно сменяют друг друга. Раз молекулярная «двойственность» действительно существует, это подтверждает спорную 30-летнюю гипотезу. Новое открытие поможет, наконец, объяснить десятки «странных» физических аномалий воды, включая ее расширение при замерзании и парадоксальное изменение вязкости под давлением.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно







Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии