Корейцы создали автономных черепах-биороботов
Группа ученых из Южной Кореи и Сингапура разработала автономную систему, которая позволяет управлять перемещением черепахи с помощью робота.
Несмотря на развитие робототехники, существующие модели роботов обладают рядом недостатков. Так, в условиях высокой влажности их датчики и актуаторы могут быть повреждены, кроме того, запас аккумуляторов у таких устройств конечен. Для доставки роботов в труднодоступные места ученые рассматривают возможность использования животных. В 2016 году сотрудники Корейского института передовых технологий (KAIST) и Исследовательского института инфокоммуникации Сингапура представили метод, позволяющий оператору удаленно управлять движениями черепахи посредством нейроинтерфейса.
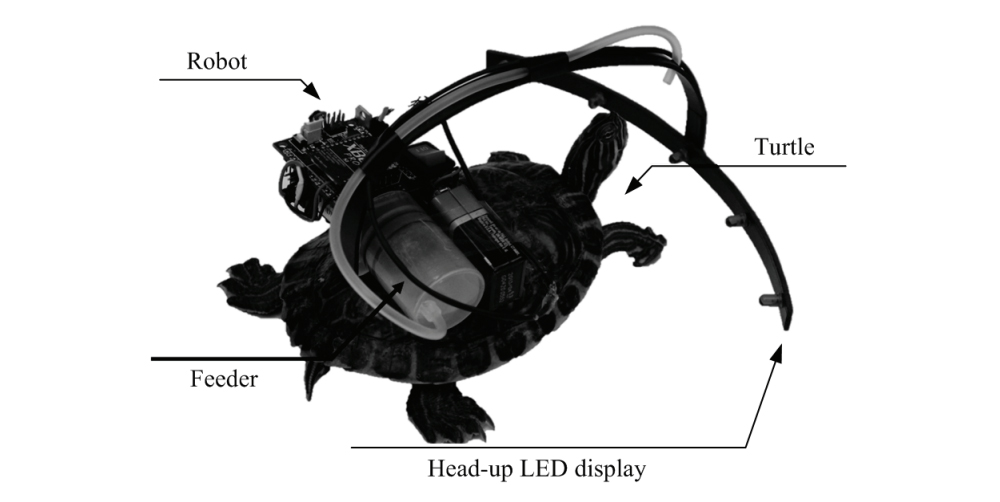
В рамках экспериментов на панцирь животного прикрепляли стимулирующее устройство и видеокамеру. С помощью мысленных команд, передаваемых по Wi-Fi, оператор мог поворачивать черный полуцилиндр с прорезью по опорной плоскости, частично закрывая обзор рептилии. Поскольку, согласно прошлым экспериментам, последние воспринимают черный цвет как препятствие, их направление движения изменяется. В новой статье ученые описали систему управления, которая не предусматривает участия оператора. Основанная на принципах паразитизма, она состоит из трех модулей: контроля, стимуляции и вознаграждения.

Для стимуляции авторы использовали четыре светодиода, прикрепленные на полукруглой раме с шагом в 30 градусов на уровне глаз животных. Активация светодиода должна была указывать направление движения, при этом радиомодем и микроконтроллер сверяли целевую траекторию с углом поворота головы и движением черепахи. При условии, что последнее соответствует команде системы, в рот рептилии с помощью мотора и шприца выдавливалась гелеобразная пища. Все модули прикреплялись к панцирю посредством эпоксидной смолы. Технология тестировалась на пяти особях в резервуаре с водой.
По условиям эксперимента, животные должны были последовательно пересечь пять точек общим расстоянием пять метров. Результаты показали, что система «робот-паразит — черепаха» позволяет успешно контролировать перемещение рептилий, несмотря на то, что в среднем пройденная ими дистанция превышала заданную — около 7,18 метра. По мнению исследователей, представленный подход может быть распространен на других животных, в том числе рыб или птиц. Предполагается, что система может использоваться в целях разведки или наблюдения на труднодоступных территориях.
В дальнейших работах авторы намерены испытать технологию в естественных условиях и усовершенствовать ее, в частности сократить влияние на животных внешних факторов: конечной целью заявлено полное сосредоточение особи на командах системы. Кроме того, в перспективе робот-паразит может быть доработан с учетом возможных препятствий и построения оптимальных маршрутов. Между тем ранее американские ученые опубликовали протокол создания миниатюрных биороботов, которые приводятся в движение за счет воздействия на модифицированные миобласты. Документ могут использовать все желающие.
Статья опубликована в журнале The Journal of Bionic Engineering.
 Telegram
Telegram  Дзен
Дзен Бывшие сотрудники NASA констатировали, что последнее видео испытаний крупнейшего космического корабля в истории снова показало проблемы и ограничения его теплового щита. С их точки зрения, любая из существующих технологий такого типа слишком сложна для реализации замысла Илона Маска о быстрой и безремонтной многоразовости Starship.
Рост средней продолжительности жизни и старение населения формируют новые требования к системе государственного планирования. Для обоснованного распределения ресурсов в сфере здравоохранения, пенсионного обеспечения и социальной поддержки необходимы достоверные данные о возрастной структуре общества. Сегодня для этого применяют специальные математические модели, позволяющие прогнозировать изменения. Проблема в том, что их создавали еще в прошлом веке. Они не учитывают существующие демографические закономерности и улучшение качества современной жизни. Их использование часто ведет к значительным погрешностям в расчетах, что, в свою очередь, делает невозможным своевременное перераспределение бюджетных средств между ключевыми государственными структурами. Ученые Пермского Политеха предложили новую модель для прогнозирования продолжительности жизни, которая работает с точностью 99,7%. Ее можно применять для планирования в сфере здравоохранения, пенсионного обеспечения и социальной поддержки.
Правительство испанского автономного сообщества Арагон поддержало строительство гигафабрики по производству аккумуляторов в Фигеруэласе — совместный проект Stellantis и CATL. Решение завершило процесс согласования, открыв путь к реализации проекта TORO.
Правильно подобранные звуковые последовательности способны не только стимулировать рост растений, но и влиять на их урожайность. К такому выводу пришли авторы нового исследования. Они разработали технологию, которая позволяет воздействовать на процессы развития растений через акустические сигналы без использования генной инженерии или химикатов. В экспериментах добились повышения урожайности мяты, сои, болгарского перца и конопли.
Бывшие сотрудники NASA констатировали, что последнее видео испытаний крупнейшего космического корабля в истории снова показало проблемы и ограничения его теплового щита. С их точки зрения, любая из существующих технологий такого типа слишком сложна для реализации замысла Илона Маска о быстрой и безремонтной многоразовости Starship.
Рост средней продолжительности жизни и старение населения формируют новые требования к системе государственного планирования. Для обоснованного распределения ресурсов в сфере здравоохранения, пенсионного обеспечения и социальной поддержки необходимы достоверные данные о возрастной структуре общества. Сегодня для этого применяют специальные математические модели, позволяющие прогнозировать изменения. Проблема в том, что их создавали еще в прошлом веке. Они не учитывают существующие демографические закономерности и улучшение качества современной жизни. Их использование часто ведет к значительным погрешностям в расчетах, что, в свою очередь, делает невозможным своевременное перераспределение бюджетных средств между ключевыми государственными структурами. Ученые Пермского Политеха предложили новую модель для прогнозирования продолжительности жизни, которая работает с точностью 99,7%. Ее можно применять для планирования в сфере здравоохранения, пенсионного обеспечения и социальной поддержки.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Древнеримские инженеры проложили колоссальную сеть дорог через Европу, Северную Африку и Ближний Восток, многие участки которой до сих пор поражают безупречной прямолинейностью. Секрет строительства заключался в использовании трех особых геодезических инструментов, с помощью которых разбивали местность на ровные отрезки и размечали трассы.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии