Робот из MIT «видит» и ловко берет предметы любой формы
Инженеры из MIT научили робота хватать и перемещать предметы любых сложных форм — даже таких, управляться с которыми машину не учили.
Группа инженеров из Лаборатории кибернетики Массачусетского технологического института разработала систему Dense Object Nets (DON), которая позволяет роботам оценивать форму предметов достаточно точно для того, чтобы захватывать их, удерживать и производить простые манипуляции без предварительного обучения на конкретном типе объектов.
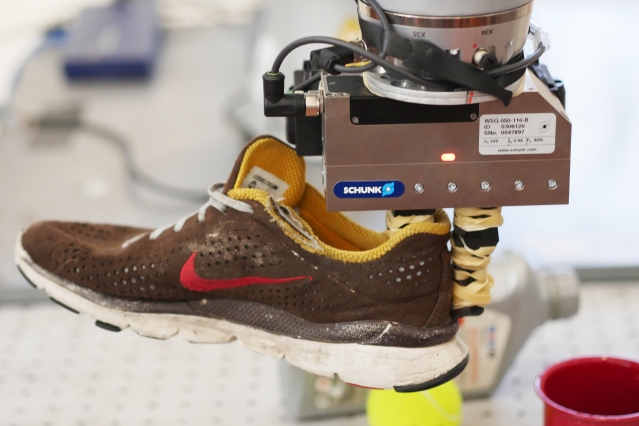
Чтобы система составила трехмерную карту объекта, рука-манипулятор поворачивает закрепленные на ней камеры под разными углами; нейросеть распознает изображения, поступающие с камеры, и определяет точные координаты каждой из множества точек, на которые раскладывается объект.
Обработав эти координаты, система классифицирует объекты и их части и анализирует пространственные отношения между ними. Чтобы продемонстрировать это, создатели DON сняли видео, на котором управляемый системой манипулятор сортирует ботинки по цветам и по команде поднимает их указанным способом — за язычок, — даже если никогда раньше не сталкивался с ботинком конкретного типа. В этом он похож на робота DexNet от инженеров из Калифорнийского университета в Беркли, хотя между управляющими ими алгоритмами есть большое различие: DexNet умеет только хватать предметы, но не умеет брать их в заданном месте и не различает типы объектов.
«Системы, использующие другие подходы к идентификации объектов, испытывают сложности, когда предмет ориентирован по отношению к роботу необычным способом. Для большинства поднять чашку за ручку — невыполнимая задача именно потому, что кружка может, например, лежать на боку или стоять вверх дном», — поясняет Лукас Мануэлли (Lucas Manuelli), один из разработчиков DON.
Роботами, умеющими различать, сортировать предметы и правильно с ними обращаться, могут найти применение на складах; создатели DON рассчитывают, что их разработка привлечет внимание крупных ретейлеров, таких как Amazon и Walmart. Кроме того, роботы, которые хорошо ориентируются в мире вещей, могут пригодиться дома — как помощники по хозяйству.
Существует два популярных подхода к обучению машин манипуляциям с физическими объектами. Первый подразумевает узкоспециальное обучение на конкретных примерах, второй — создание универсального алгоритма захвата. В первом случае машина будет справляться только с ограниченным набором заданий — скажем, сможет поднимать мячи, — но не справится с кубиком, пока ее не обучат брать кубики. Универсальные способы хватать вещи редко бывают эффективными, а кроме того, с захваченным «универсальным» способом предметом трудно производить точные манипуляции: например, поставить на заданное место. DON справляется даже с незнакомыми объектами и позволяет точно предсказывать, в какой точке окажутся их конкретные точки после перемещения.
Создатели DON выступят с докладом на конференции по обучению роботов в Цюрихе в октябре; кратко о разработке рассказывает портал Массачусетского технологического института. Ранее инженеры из MIT разработали робота, умеющего захватывать свободно висящие объекты.
 Telegram
Telegram  Дзен
Дзен Исследователи из США нашли в организме человека ранее неизвестный пептид BRP и проверили его работу на животных. В экспериментах он помог снизить аппетит и процент содержания жира без побочных эффектов. По механизму действия BRP напоминает препараты для снижения веса на основе ГПП-1, к которым относится семаглутид, но, предположительно, действует иначе: не через кишечник и поджелудочную железу, а преимущественно через центральные сигнальные пути в мозге, включая области гипоталамуса, участвующие в регуляции аппетита. Авторы новой научной работы рассматривают открытие как основу для принципиально нового класса лекарств от ожирения.
Хотите узнать, из чего формируются планеты земного типа, — присмотритесь к белым карликам. В их атмосфере нередко оседают химические элементы из окружающего космоса, в частности обломки разрушенных планетных тел системы. В новом исследовании ученые описали как раз такой объект. «Грязный» белый карлик WD 1532+129 накопил на своих магнитных полюсах тяжелые элементы и поставил рекорд по медлительности.
В поисках внеземного разума ученые могли упустить часть возможных сигналов. Автор сразу двух исследований показала, что астрономы почти не изучали один из перспективных диапазонов радиоволн и недооценивали число звезд, которые уже попадали в поле зрения телескопов.
Правильно подобранные звуковые последовательности способны не только стимулировать рост растений, но и влиять на их урожайность. К такому выводу пришли авторы нового исследования. Они разработали технологию, которая позволяет воздействовать на процессы развития растений через акустические сигналы без использования генной инженерии или химикатов. В экспериментах добились повышения урожайности мяты, сои, болгарского перца и конопли.
Формально почти вся программа тринадцатого полета самой большой ракеты в истории выполнена. Однако испытания показали неполную отлаженность ключевого элемента системы. SpaceX оказывается в ситуации действительно плотных сроков: до намеченного возвращения людей на Луну всего два года и два месяца.
Сегодня на земле существует примерно 7500 языков, однако ученые давно подозревали, что в прошлом их было значительно больше. Международная группа лингвистов реконструировала историю языкового разнообразия за последние 12 тысяч лет и пришла к выводу, что человечество уже пережило «золотой век» языков, после которого их число начало быстро сокращаться.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Древнеримские инженеры проложили колоссальную сеть дорог через Европу, Северную Африку и Ближний Восток, многие участки которой до сих пор поражают безупречной прямолинейностью. Секрет строительства заключался в использовании трех особых геодезических инструментов, с помощью которых разбивали местность на ровные отрезки и размечали трассы.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии