Искусственную нейросеть научили взвешивать виртуальные объекты
Американские ученые разработали систему искусственного интеллекта (ИИ), которая может определять количественные характеристики виртуальных объектов. Препринт исследования опубликован на сервере arXiv.org.
Последние достижения в области машинного обучения позволяют искусственным нейросетям соревноваться с человеком в разных приложениях, например в распознавании устной речи или лиц. Однако компьютеры остаются неспособны идентифицировать свойства объектов. В частности, для того, чтобы научиться перемещать манипулятор к дверной ручке, роботу, которым управляет нейросеть, необходимо около двух часов.
Ученые из Google DeepMind, Калифорнийского университета в Беркли и других учреждений разработали систему на базе рекуррентной LTSM-сети. Для ее обучения авторы использовали два различных виртуальных мира, в которых компьютер мог взаимодействовать с окружающими предметами. В первом мире находилось четыре одинаковых по размеру куба, масса которых была произвольной в каждой сессии эксперимента. Во втором мире находилось пять кубов, сложенных в башню.
Задачей компьютера в первом мире было найти наиболее тяжелый куб. Для этого он мог двигать объекты по вертикали (напрямую), прикладывая определенную силу. При успешном выполнении задания ИИ получал условное вознаграждение, в случае неудачи — штраф. Спустя около 100 тысяч повторений компьютер «понял», что для выявления самого тяжелого куба необходимо предварительно взвесить все кубы, после чего дать ответ.
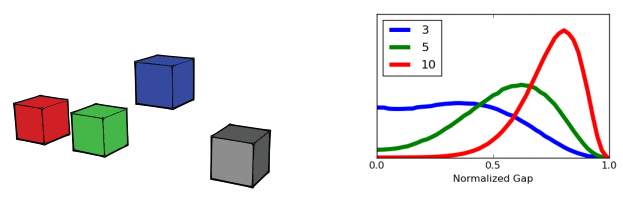
Во втором мире алгоритм должен был выяснить количество находящихся перед ним объектов. Часть кубов в этом случае располагалась друг на друге, формируя единый блок. Компьютер также мог взаимодействовать с кубами, после чего получал положительную или отрицательную обратную связь. Со временем он разработал оптимальную стратегию выполнения задачи: сперва башня разрушалась, после чего оценивалось количество ее элементов.
По словам ученых, потенциально метод можно использовать для роботов, которым, например, будет необходимо перемещаться по пересеченной местности. Кроме того, система может быть актуальна для сервисных роботов, в задачи которых войдет целенаправленное взаимодействие с окружающими объектами, в частности роботов-космонавтов. Система обучения, которую применяли авторы, сейчас используется для обучения игрового искусственного интеллекта.
 Telegram
Telegram  Дзен
Дзен Команда исследователей из Германии и Турции впервые исследовала ледник на вершине Большого Арарата на высоте более пяти тысяч метров. Две недели в июле 2026 года ученые собирали данные о вечных снегах горы, которые до этого не были тщательно исследованы.
Даже успешная химиотерапия не всегда означает окончательную победу над опухолью: часть раковых клеток переживает лечение, перестает делиться и переходит в состояние клеточного старения. Новое исследование показало, что именно такие клетки могут создавать условия, облегчающие образование метастазов.
Психологи показали, что базовые черты человеческой личности меняются на протяжении жизни не меньше, чем уровень дохода или состояние здоровья. Проанализировав данные более 160 тысяч человек, ученые пришли к выводу, что общепринятое представление о «неизменном характере» ошибочно.
Команда исследователей из Германии и Турции впервые исследовала ледник на вершине Большого Арарата на высоте более пяти тысяч метров. Две недели в июле 2026 года ученые собирали данные о вечных снегах горы, которые до этого не были тщательно исследованы.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Правительство испанского автономного сообщества Арагон поддержало строительство гигафабрики по производству аккумуляторов в Фигеруэласе — совместный проект Stellantis и CATL. Решение завершило процесс согласования, открыв путь к реализации проекта TORO.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно







Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии