В Японии создали робота с живыми мыщцами
Инженеры из Токио разработали биогибридного робота, имитирующего движения человеческого пальца. В устройстве используются живые мышечные клетки крысы.
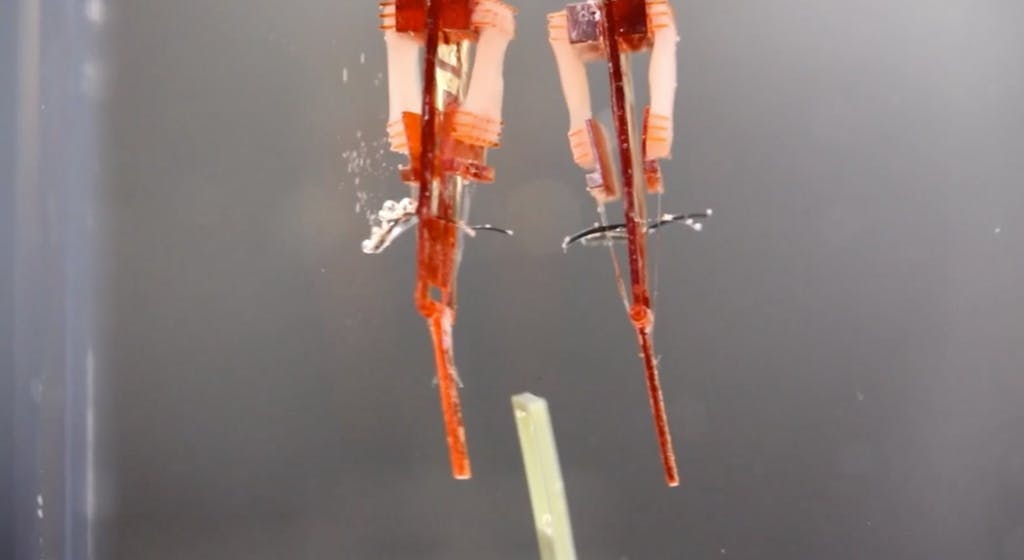
Исследователи из Токийского университета представили биогибридного робота, созданного на основе живой мышечной ткани крысы и каркаса из металла и пластика. Устройство имитирует движения человеческого пальца, оно способно перемещать небольшие предметы, сгибаясь в суставе. Описание разработки опубликовано в журнале Science Robotics.
Работая над другими конструкциями, инженеры выяснили, что традиционные материалы — пластик и металл — не позволяют воспроизвести движения и гибкость человеческих пальцев. Материалом для мускулов робота стали тонкие гидрогелевые пластинки, покрытые миобластами крысы — молодыми мышечными клетками, из которых впоследствии развивается поперечно-полосатая мышечная ткань. Пластинки укрепили на каркасе из металла и пластика.
Мускулы робота сокращаются, когда к ним подается электрический ток. Чтобы искусственный палец двигался так же, как человеческий, инженеры воспроизвели работу парных мышц — агонистов и антагонистов. Когда один из мускулов, входящих в пару, сокращается, другой расслабляется. По словам разработчиков, при такой слаженной работе искусственные мускулы «живут» дольше, чем в предыдущих экспериментах, где использовали одиночные мышцы.
Сустав нового робота сгибается почти на 90°, это позволяет выполнять сравнительно сложные задачи. Сейчас робот способен приподнимать предметы и перемещать их. Использование живой ткани накладывает определенные ограничения: например, устройство может работать только в воде, потому что при постоянном движении мышца быстро изнашивается. Сейчас срок жизни искусственного мускула составляет не больше недели.
Один из разработчиков, инженер Сёдзи Такеучи (Shoji Takeuchi), говорит: «Если мы сможем совместить больше таких мускулов в одном устройстве, нам удастся воспроизвести комплексное мышечное взаимодействие, которое позволяет функционировать рукам, ладоням и другим частям тела. Хотя наша разработка — лишь предварительный этап, такой подход может стать большим шагом к созданию более сложных биогибридных систем».
Ранее в США разработали ползающего робота на основе мышц морских улиток.
 Telegram
Telegram  Дзен
Дзен Во второй половине XIX века в книге о насекомоядных растениях Чарлз Дарвин предположил, что некоторые камнеломки с липкими железистыми волосками могут проявлять свойства хищника — ловить и переваривать насекомых. Но тогда ученому не удалось экспериментально подтвердить свою догадку. Теперь это сделала международная команда ботаников.
Хотя тротиловый эквивалент взрыва от удара был умеренным, всего несколько тонн, благодаря рыхлости лунного грунта низких широт он может поднять до 400 тонн пыли. Она способна образовать облако высотой в десятки километров. Астрономы надеются провести наблюдения этого события и, возможно, зафиксировать какие-то особенности выброшенного лунного материала.
Ученые объяснили, почему большинство диет закончилось возвратом килограммов: человеческий мозг воспринял ранее достигнутый максимальный вес как новую норму выживания и попытался его вернуть. Это открытие доказало, что современные методы похудения не учитывают древние встроенные особенности нашего организма.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
Команда исследователей из Германии и Турции впервые исследовала ледник на вершине Большого Арарата на высоте более пяти тысяч метров. Две недели в июле 2026 года ученые собирали данные о вечных снегах горы, которые до этого не были тщательно исследованы.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии