#робототехника
Инженеры по всему миру создают новых роботов, вдохновляясь человеком или животным. Однако робот по имени Аргус выглядит совсем иначе. У него двадцать ног, и он может передвигаться по сложным поверхностям, даже если несколько ног сломаются.

Южная Корея хочет активнее использовать в армии роботов и системы на базе искусственного интеллекта. Власти страны уже обсуждают возможное партнерство с Hyundai Motor.

Автономный робот Ace от компании Sony выиграл три из пяти матчей против элитных настольных теннисистов, но проиграл оба матча профессионалам. Система с искусственным интеллектом смогла достойно конкурировать с игроками по технике, мгновенной реакции и расчету вращения мяча. Для этого робот следил за мячом девятью камерами и оценивал вращение 400-700 раз в секунду.

Новый метод поможет роботам самостоятельно находить оптимальные пути. В перспективе это позволит создавать фабрики, где машины самостоятельно управляют процессами. Разработку могут взять на вооружение создатели автоматических аппаратов, предназначенных для изучения других планет.

Значительная часть труб в коммунальном хозяйстве (водопроводы, теплотрассы), а также в нефтяной и химической промышленности — старые и сильно изношены. Они постоянно требуют осмотра, чистки и ремонта, чтобы не произошло аварий и разрывов. Существующие технологии и роботы для работы внутри труб несовершенны, поскольку не могут проходить крутые повороты (например, под 90 градусов) и работают только в трубах одного, строго заданного диаметра. Ученые Пермского Политеха и Волгоградского государственного аграрного университета разработали универсального робота, который лишен этих ограничений. Он автоматически подстраивается под диаметр трубы и благодаря особой конструкции колес не застревает на поворотах. Ключевое преимущество — устройство работает в трубах вдвое меньшего диаметра, чем аналоги. Это делает его идеальным инструментом для обслуживания сложных участков трубопроводных сетей, недоступных для других технологий. Разработка доказала свою эффективность на испытаниях.
Благодаря новому подходу робот смог выполнить за день тысячу задач. Метод также значительно ускорил обучение роботов.

Илон Маск назвал человеческую руку «чрезвычайно сложной». По его словам, это серьезное препятствие для робототехники. Однако инженеры смогли добиться от роботизированной руки движений, приближенных к «человеческому уровню».

Ежегодный всплеск спроса на ягоды скрывает серьезную экономическую проблему. Высокая стоимость рабочей силы напрямую влияет на розничные цены. Только в 2025 году для уборки урожая потребовалось около 50 тысяч сезонных сотрудников, так как аграрный сектор остается одной из немногих отраслей с преобладанием ручного труда. Причина в хрупкости ягод и том, что спелые плоды скрыты под зеленью. Современные решения имеют недостатки: дроны не видят их под листвой и имеют малую грузоподъемность, а роботы действуют нескоординированно, пропуская участки из-за отсутствия общего плана. Решение предложили ученые Пермского Политеха. Они разрабатывают систему для автоматизированного сбора ягод на больших сельскохозяйственных территориях с использованием группы мобильных роботов. В отличие от существующих аналогов, предлагаемый подход основан на создании не универсального устройства, а набора разных агентов-помощников, где каждый из них выполняет свою часть работы.


Ученые из Калифорнийского технологического университета (США) сконструировали для подводного дрона движитель, имитирующий механические движения хвостового плавника тунца. Вдохновленное природой изобретение позволит улучшить характеристики беспилотных устройств, а именно — повысить их маневренность и скорость для выполнения глубоководных исследований.

Роботы-манипуляторы — это промышленные установки, которые выполняют функции человеческой руки. Их активно используют на различных серийных производствах, в частности в металлообработке, автомобилестроении, фармацевтике и многих других. В зависимости от программы, манипуляторы способны выполнять широкий спектр задач, тем самым улучшая условия труда и снижая расходы предприятий. При этом со все большим внедрением подобных установок в промышленность возникает спрос на высококвалифицированные кадры с навыками робототехники. Ученые Пермского Политеха запатентовали инновационный учебный робот-манипулятор для обучения молодых специалистов основам программирования и управления промышленными роботизированными установками.
Исследователи из международной студенческой некоммерческой организации App-In Club (США) сконструировали экономичную роботизированную систему, способную воспроизводить человеческий почерк. Такая машина может автоматизировать создание рукописных документов — писем, юридических бумаг, текстов, художественных визуализаций — в режиме реального времени.

Что лучше — нейрокомпьютерные или окулографические интерфейсы? Почему людей надо подбирать под интерфейсы, а интерфейсы — под людей? Об этом мы поговорили с Ярославом Туровским, профессором, заведующим лабораторией медицинской кибернетики ВГУ, ведущим научным сотрудником ИПУ РАН, доктором технических наук и кандидатом медицинских наук, признанным специалистом в области разработки нейроинтерфейсов.

Инженеры Федеральной политехнической школы Лозанны (Швейцария) сконструировали мультимодального робота, который может не только взлетать, но и ходить, и прыгать, как птицы. Крылатый дрон способен так же легко, как пернатые, перемещаться как в наземной, так и в воздушной среде. При этом за мощные ноги ему не надо расплачиваться дополнительным весом — это позволит найти новые решения для взлета беспилотников и самолетов в сложных условиях.

С каждым годом роботы становятся все совершеннее и совершеннее, и все активнее внедряются в мир людей. Перед учеными сегодня стоит задача не только добиться максимальной эффективности, но и обеспечить комфортное и безопасное взаимодействие двух миров. Чего мы достигли и куда двигаться дальше? Какова роль фундаментальной науки применительно к робототехнике? Чем мы можем гордиться и где брать специалистов? Ответы на эти вопросы вы найдете в интервью профессора РАН, доктора технических наук Романа Валерьевича Мещерякова, главного научного сотрудника Института проблем управления имени В. А. Трапезникова РАН.

Командная работа роботов пока остается несовершенной в реальных условиях. Робототехники успешно создают приложения и проводят эксперименты в лабораториях, однако самоорганизующиеся системы дают сбой, как только выходят за их пределы. Ученые из Бельгии предложили новый подход к программированию роя роботов, который предусматривает централизованное управление.

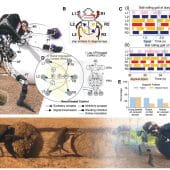
Международная группа инженеров разработала робота, имитирующего способности навозного жука. Механическое насекомое превзошло возможности своего прототипа, продемонстрировав недюжинную силу и ловкость. Полученные характеристики можно применить в спасательных и строительных работах.
Обычно гидрогели растягиваются только в одном направлении и не возвращаются в изначальное состояние. Команда китайских химиков создала полиэлектролитный гидрогель, который может увеличиваться в размере в 15 раз по сравнению с изначальной длиной, а затем возвращаться к своей первоначальной форме. Ученые считают, что их разработку можно будет использовать для изготовления мягких роботизированных захватов и искусственных сухожилий.
В современном мире роботизация промышленного производства стала одним из ключевых факторов повышения производительности и конкурентоспособности предприятий. Это касается и мебельного производства в любых масштабах. Одна из главных задач на таких предприятиях — сортировка и перемещение мебельных заготовок в автоматическом режиме с использованием новых технологий и роботов-манипуляторов. Исследованиями в этой области активно занимаются как серьезные исследовательские организации, так и компании-разработчики промышленных роботов. В МТУСИ на кафедре «Интеллектуальные системы в управлении и автоматизации» ведется проектирование системы управления робототехническим комплексом для сортировки и перемещения заготовок в мебельном производстве.



Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно







Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии