Ученые предложили систему сбора ягод с распределением обязанностей между роботами
Ежегодный всплеск спроса на ягоды скрывает серьезную экономическую проблему. Высокая стоимость рабочей силы напрямую влияет на розничные цены. Только в 2025 году для уборки урожая потребовалось около 50 тысяч сезонных сотрудников, так как аграрный сектор остается одной из немногих отраслей с преобладанием ручного труда. Причина в хрупкости ягод и том, что спелые плоды скрыты под зеленью. Современные решения имеют недостатки: дроны не видят их под листвой и имеют малую грузоподъемность, а роботы действуют нескоординированно, пропуская участки из-за отсутствия общего плана. Решение предложили ученые Пермского Политеха. Они разрабатывают систему для автоматизированного сбора ягод на больших сельскохозяйственных территориях с использованием группы мобильных роботов. В отличие от существующих аналогов, предлагаемый подход основан на создании не универсального устройства, а набора разных агентов-помощников, где каждый из них выполняет свою часть работы.

Сезонный всплеск спроса на ягоды, например, клубнику, чернику и морошку, наблюдается ежегодно с наступлением летнего периода. Особенно высока популярность «виктории», объемы продаж которой исчисляются тоннами. Однако за этим видимым изобилием скрывается серьезная экономическая проблема: высокая стоимость ручного труда, напрямую влияющая на розничные цены, делая сельскохозяйственные культуры менее доступными для потребителей.
Согласно данным Минсельхоза, только в 2025 году для уборки урожая в России потребовалось привлечь около 50 тысяч сезонных рабочих. Эта цифра наглядно демонстрирует, что даже в эпоху повсеместной автоматизации аграрный сектор остается одной из немногих отраслей, все еще основанной на ручном труде.
Причина в биологических особенностях ягод. Они хрупкие, легко мнутся и повреждаются при механическом воздействии. Дополнительную сложность создает то, что спелые плоды часто скрыты под листвой, оставаясь недоступными для большинства видов техники.
К тому же, современные технические решения несовершенны. Дроны не подходят из-за короткого времени работы, малой грузоподъемности и неспособности находить плоды под листьями. Доступные модели роботов функционируют нескоординированно: каждый действует самостоятельно на основе данных только своих датчиков. Это приводит к низкой эффективности, так как они повторно обрабатывают одни и те же участки и пропускают другие, не обмениваясь информацией.
Решение предложили ученые Пермского Политеха. Они разрабатывают систему для автоматизированного сбора ягод на больших сельскохозяйственных территориях с использованием группы мобильных роботов. В отличие от существующих аналогов, предлагаемый подход основан на создании не универсального робота, а набора разных агентов-помощников, где каждый из них выполняет свою часть работы. Статья опубликована в сборнике «Инновационные технологии: теория, инструменты, практика».
— Создание одного устройства, способного одновременно искать, собирать и транспортировать ягоды, технически сложно и экономически нецелесообразно. Такие роботы, как правило, получаются слишком тяжелыми, начинают утрамбовывать почву и топтать грядки, тратят много энергии на развороты и могут подолгу задерживаться на одном месте в поисках плодов. Наш подход предполагает распределение функций между тремя типами автоматизированных помощников: компактные разведчики обнаруживают спелые ягоды и строят карту местности, механизмы-манипуляторы аккуратно собирают урожай, а агенты-бункеры обеспечивают транспортировку. Это позволяет параллельно выполнять все операции и значительно увеличивает общую производительность системы, — объясняет Антон Посягин, доцент кафедры «Автоматика и телемеханика» ПНИПУ, кандидат технических наук.
Для фермерских ягодных полей стандартного размера от одного до пяти гектаров (5 гектаров — это примерно семь футбольных полей) ученые оценили необходимое число роботов: от пяти до шести разведчиков, от двух до трех сборщиков и от одного до двух транспортировщиков. Такой состав обеспечивает полное покрытие территории и непрерывность рабочего процесса, а, кроме того, позволяет менять это количество в зависимости от сезона, чтобы, например, снизить общее энергопотребление системы.
Однако для слаженной работы робототехники на больших полях требуется надежная коммуникация. Поэтому ученые выбрали радиосвязь, так как она обеспечивает достаточную дальность и стабильность соединения. К тому же, это решение определило принцип всей работы системы.
Ее основой стала централизованная платформа управления, где координация осуществляется из единого центра, а автоматизированные помощники выполняют заданные команды. Вместо того чтобы наделять каждого робота автономностью (когда каждый сам принимает решение, куда ехать и что делать), ученые разработали эффективный порядок обмена данными. При таком подходе управляющий компьютер координирует действия всех устройств, получая от них краткие отчеты об обстановке и выдавая конкретные команды для дальнейших операций.
— Для организации связи исследователи разработали алгоритм работы по принципу рации с поочередной передачей данных. Компьютер отправляет агенту короткий запрос и переключается на прием. Робот передает сжатый отчет об обстановке (например, «слева препятствие, справа свободно») и ожидает ответа. Обработав информацию, компьютер отправляет конкретную команду для дальнейших действий, — рассказал Антон Посягин, доцент кафедры «Автоматика и телемеханика» ПНИПУ, кандидат технических наук.
Такой последовательный обмен сообщениями позволяет поддерживать стабильную связь со всеми роботами одновременно, без помех и потери данных, даже когда в поле работает целая группа аппаратов.
Чтобы проверить надежность этой системы связи на практике, ученые сначала собрали экспериментальную установку из трех тестовых образцов. Именно на этом этапе «мозг» системы — управляющий компьютер — впервые начал работать с реальными аппаратами. Он получал от них данные и отрабатывал свою главную задачу: в реальном времени строил общую карту местности, распределял зоны между устройствами, планировал маршруты и координировал действия всей группы, чтобы они не мешали друг другу. На них отработали три ключевых сценария: как система работает при поломке одного робота, как разные алгоритмы планирования маршрутов справляются с полями разной формы, и как несколько роботов взаимодействуют, не мешая друг другу.
Результаты испытаний подтвердили преимущества централизованной системы — устройства демонстрировали более высокую эффективность по сравнению с децентрализованными аналогами: обеспечивали полный охват территории без дублирования маршрутов и сохраняли работоспособность при выходе из строя любого агента, тогда как альтернативные системы показывали хаотичное движение и низкую производительность.
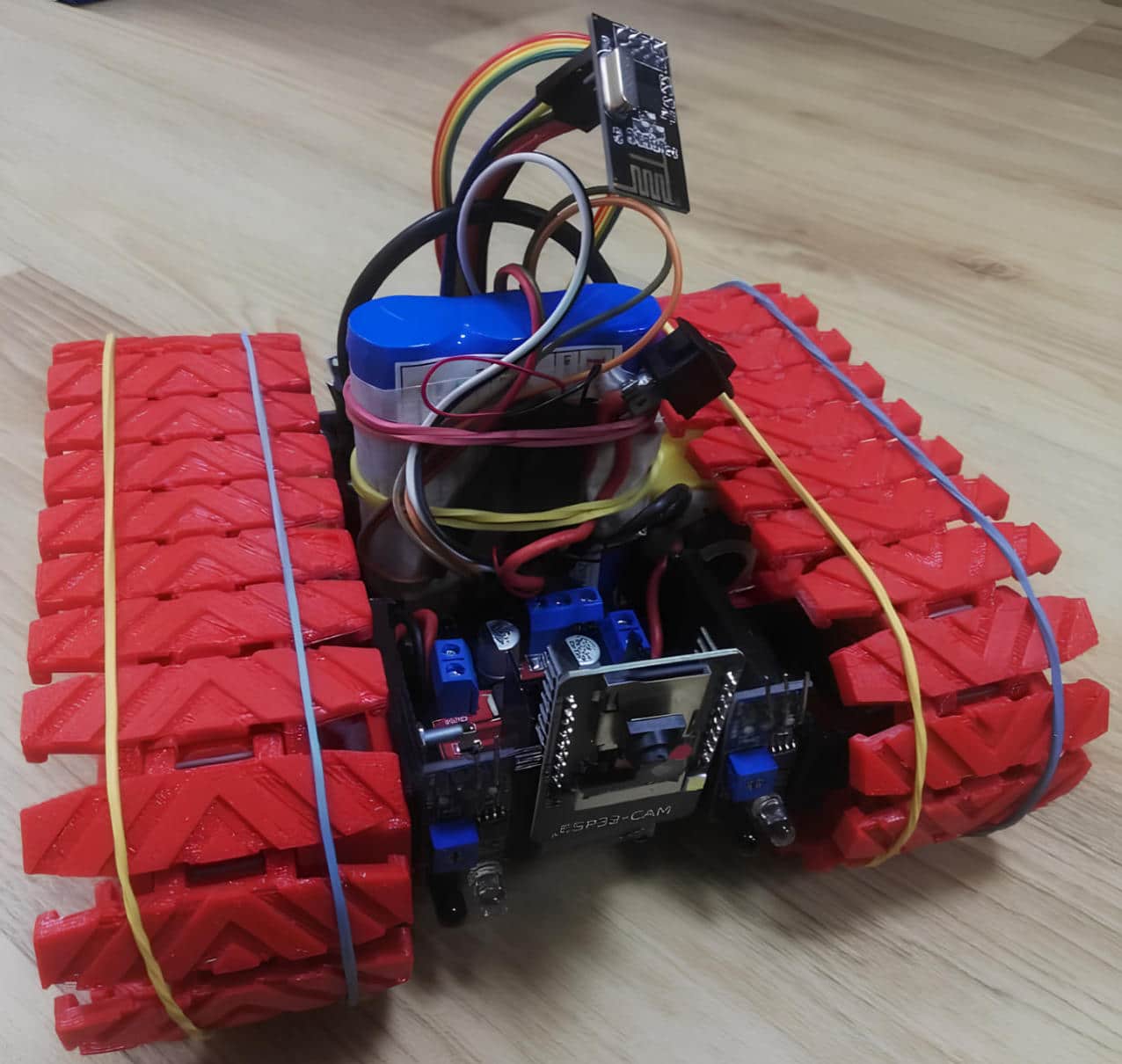
Положительные результаты тестирования макета позволили перейти к сборке полнофункционального прототипа. На сегодняшний день ученые уже создали работающего робота-разведчика — компактное устройство размером 40 сантиметров с гусеничным механизмом для повышенной проходимости по неровной сельскохозяйственной местности. Данный аппарат также оснащен инфракрасными датчиками для обнаружения препятствий и магнитными энкодерами (устройства, преобразующие механическое вращение в точные цифровые данные о положении и скорости) для точного определения пройденного пути.
— Сейчас мы работаем над оснащением прототипа системой компьютерного зрения для распознавания спелых ягод, а также над созданием отдельных манипуляторов (с гибким захватным устройством) для аккуратного сбора и агентов-бункеров (с емкостью) для транспортировки, — поделился Антон Посягин.
Данная технология открывает путь к полной автоматизации одного из самых трудоемких процессов в сельском хозяйстве, что в перспективе позволит увеличить объемы урожая и снизить его себестоимость для потребителей.
 Telegram
Telegram  Дзен
Дзен Паразитические организмы иногда не учитывают, что сами могут оказаться целью паразита более высокого уровня. Сосредотачивая все свои силы на инфицировании и размножении, они остаются беззащитными перед агрессивным специализированным нахлебником.
Интригующие испытания высотного ракетного двигателя Raptor Vacuum для корабля Starship, верхней ступени сверхракеты Илона Маска, парадоксальны. Его работа на уровне моря уже сама по себе загадка. Ведь, по классическим представлениям, высотные двигатели на уровне моря корректно не работают. А сопло RaptorVAC на наземном стенде извергает реактивную струю без всяких признаков нарушения работы. Как такое может быть?
Способность договариваться с сородичами, будь то танец пчел или предупреждающий крик примата, хорошо изучена. Но то, как животные координируют действия с представителями других видов, долго оставалось загадкой. Международная группа ученых собрала воедино все известные случаи такой межвидовой коммуникации и выяснила, что во время эволюции выработался гибкий язык сигналов.
Паразитические организмы иногда не учитывают, что сами могут оказаться целью паразита более высокого уровня. Сосредотачивая все свои силы на инфицировании и размножении, они остаются беззащитными перед агрессивным специализированным нахлебником.
Интригующие испытания высотного ракетного двигателя Raptor Vacuum для корабля Starship, верхней ступени сверхракеты Илона Маска, парадоксальны. Его работа на уровне моря уже сама по себе загадка. Ведь, по классическим представлениям, высотные двигатели на уровне моря корректно не работают. А сопло RaptorVAC на наземном стенде извергает реактивную струю без всяких признаков нарушения работы. Как такое может быть?
Физики Инженерной школы ядерных технологий ТПУ разработали новый подход к созданию материалов водородной энергетики, основанный на управлении дефектной структурой и иерархической архитектурой материала. Подход позволяет перейти от традиционного подбора составов и добавок к проектированию материалов с заданными характеристиками хранения и транспорта водорода.
Хотя длительность помех не превышала десяти секунд, это первый известный случай такого рода. Обычно спутникам не хватает мощности для создания радиосигналов той силы, что нужна для подобных помех.
В доколумбовых Андах принадлежность к правящему роду определяла доступ к земле, торговле и статусу, поэтому удержать все внутри семьи было вопросом выживания. Ученые выяснили, что элиты долины Чинча решали эту задачу самым прямым способом — заключая браки между родственниками на протяжении как минимум двух поколений.
Вначале Reuters опубликовал статью о взаимоотношениях SpaceX и Пентагона, которую миллиардер --- традиционно для его отношений с этим изданием — назвал фейком. Опровергая ее тезисы, он обнародовал информацию, не представленную ранее публично.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно





Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно