Разработана простая и экономичная система управления складским роботом
Складские роботы — это автоматизированные устройства, предназначенные для перемещения предметов внутри складских помещений. Применение в работе подобных механизмов позволяет уменьшить вероятность человеческой ошибки. Для того, чтобы хорошо ориентироваться, робот должен понимать, какие препятствия ему попадаются, и знать, где он находится. Есть много навигационных систем, которые отслеживают изменения вокруг и строят маршрут, но они требуют много датчиков, что делает устройство дорогим. Ученые Пермского Политеха разработали более простую систему управления складским роботом, которая позволяет ему перемещаться по заранее заданной траектории.
Статья опубликована в журнале «Инновационные технологии: теория, инструменты, практика». Исследование выполнено в рамках реализации программы академического стратегического лидерства «Приоритет 2030».
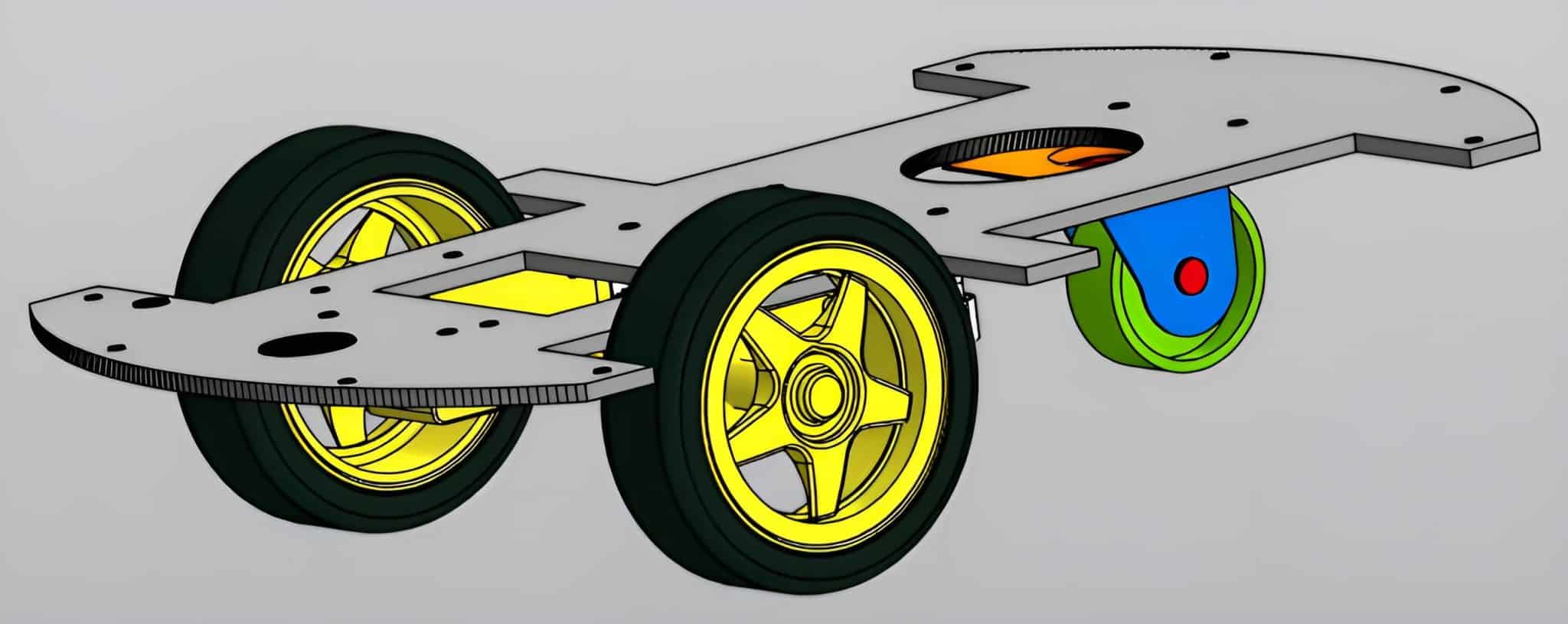
Складской робот представляет собой сложное устройство, сочетающее в себе механику, электронику и программное обеспечение, предназначенное для автоматизации различных складских операций. Он оснащен электроприводами и колесами для передвижения и датчиками для распознавания того, что находится вокруг него.
Существует множество мобильных роботов, которые считывают информацию о меняющемся окружении и на основе этого прокладывают маршрут: спутниковая система GPS, радиомаяки, лазерная навигация и другие. Проблема в том, что для работы им требуется большое количество дорогостоящих датчиков, что увеличивает их цену. Также внутри помещений теряются все преимущества глобальной спутниковой навигации, так как такой сигнал часто не проходит сквозь бетонные и металлические конструкции. При этом складские роботы в большинстве случаев ездят по одним и тем же маршрутам – следовательно, такие сложные механизмы отслеживания изменений в окружающем мире теряют свою необходимость.
Ученые Пермского Политеха разработали систему управления складским роботом, которая упрощает его навигацию внутри помещения.
Они предложили использовать линии на плоскости, по которой перемещается устройство. Для этого на пол наклеивается изолента контрастного поверхности цвета. Эта система предназначена для использования небольшими складами – до 500 квадратных метров (класс D).
«Мы разработали алгоритм, который позволяет осуществлять наиболее эффективное движение по заданной траектории. Реализация потребует всего четыре инфракрасных датчика, работающих автономно. Сначала необходимо разместить на полу линии согласно схеме движения. Их определяют датчики, показания с которых поступают в специальный блок. Если левый или правый датчик фиксирует полосу, которая пересекает путь робота, он останавливается и при необходимости поворачивает. Вместе с тем он ведет подсчет пройденных перекрестов и продолжает движение, пока не пройдет нужное количество. После этого он останавливается, то есть прибывает на место назначения», – рассказывает Сергей Сторожев, доцент кафедры «Автоматика и телемеханика» ПНИПУ, кандидат технических наук.
Эксперимент над разработкой проводился путем моделирования движения робота на компьютере. Ему необходимо было проехать два перекрестка, повернув налево на каждом, и остановиться на третьем. Тестирование показало, что навигационный механизм успешно справляется со своей задачей.
«Существующие системы перемещения предметов на складах либо не автономны, либо используют дорогостоящее оборудование. Как правило, их применение на маленьких складах не окупается. Мы предлагаем более дешевое решение, которое позволит применять роботов и в небольших помещениях. Нашу модель управления возможно реализовать без анализа видеоряда и использования дорогих датчиков и устройств распознавания – лидаров, камер. Это не только упрощает систему навигации, но и позволяет снизить ее стоимость в семь раз», – комментирует Ольга Глухова, магистрант кафедры «Автоматика и телемеханика» ПНИПУ.
Разработка ученых Пермского Политеха представляет собой эффективное и экономичное решение для обеспечения надежной навигации в предсказуемой складской среде. Алгоритмы движения, разработанные политехниками, позволяют значительно упростить процесс перемещения робота, а экономичность системы делает ее доступной для более широкого круга предприятий, в том числе обладающих небольшими складами, где применение дорогостоящего оборудования не окупается.
 Telegram
Telegram  Дзен
Дзен Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
Психологи показали, что базовые черты человеческой личности меняются на протяжении жизни не меньше, чем уровень дохода или состояние здоровья. Проанализировав данные более 160 тысяч человек, ученые пришли к выводу, что общепринятое представление о «неизменном характере» ошибочно.
В Тюмени у «Газпром нефти» естественным образом сформировался большой научно-исследовательский кластер. В городе расположено более десятка институтов и образовательных центров, филиалы РАН, а в 2024 году на полную мощность заработал исследовательский центр «Геосфера». Корреспондент Naked Science побывала в Тюмени по приглашению «Газпром нефти». Рассказываем об этом опыте в подробностях.
Команда исследователей из Германии и Турции впервые исследовала ледник на вершине Большого Арарата на высоте более пяти тысяч метров. Две недели в июле 2026 года ученые собирали данные о вечных снегах горы, которые до этого не были тщательно исследованы.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно