В Перми разработали прототипы мобильных роботов-мусорщиков
Экологическое загрязнение — одна из основных проблем современности. Сегодня для борьбы с ней ведутся активные разработки роботов, которые быстро и тщательно очищают территории от мусора. Уже успешно применяются автоматические пылесосы и устройства для уборки городских улиц. Однако большие и сложные зоны, вроде лесов и степей, нуждаются в более нестандартных и индивидуальных решениях. Ученые Пермского Политеха работают над проектом по созданию роботов для качественной очистки таких объектов. Идея заключается в распределении нагрузки между несколькими машинами. Это обеспечит эффективное исследование сложной местности и сбор мусора без лишней потери энергии.
Статья опубликована в сборнике «Инновационные технологии: теория, инструменты, практика». Исследование выполнено в рамках программы стратегического академического лидерства «Приоритет 2030».
В большинстве случаев мусор оказывается в водоемах, лесах, на пляжах и городских улицах в результате активной деятельности человека. Оставленные на земле или неправильно выброшенные пластиковые отходы, бутылки, окурки, пакеты и многое другое наносят вред окружающей среде. В состав же добровольцев или рабочих людей, занимающихся сбором мусора в общественных местах, входит всего 1-2 процента населения. Учитывая масштабы бытовых отходов, разработка автоматических устройств – это эффективный и универсальный способ для стабильной и качественной уборки территорий.
Существующие аналоги роботов-мусорщиков представляют собой довольно крупные единицы, поглощающие отходы в свой внутренний бак. Их недостаток в том, что они двигаются по всей заданной территории и тратят энергию и время даже на те участки, которые находятся в чистом состоянии, то есть работают «вхолостую». Использование такого робота нецелесообразно, дорого и времязатратно.
Ученые Пермского Политеха работают над проектом для очистки больших и сложных зон с применением нескольких подвижных агентов – мобильных роботов, способных самостоятельно принимать решение о перемещениях. Благодаря возможности беспрепятственно исследовать местность, собирать данные и обмениваться ими между собой, дальнейший сбор мусора будет быстрее и продуктивней.
«Вместо создания универсального устройства эффективнее, если каждый из роботов будет выполнять часть общей задачи, чтобы распределить нагрузку между всеми машинами. Поэтому мы предложили такую модель: компактные роботы занимаются поиском, определяют местоположение мусора и строят карту местности. Другие, более крупные, – собирают отходы по сформированной карте. Это позволит не тратить энергию на лишние перемещения, а также снизить возможный ущерб при передвижении тяжелых роботов по территории», – объясняет Антон Посягин, доцент кафедры «Автоматика и телемеханика» ПНИПУ, кандидат технических наук.
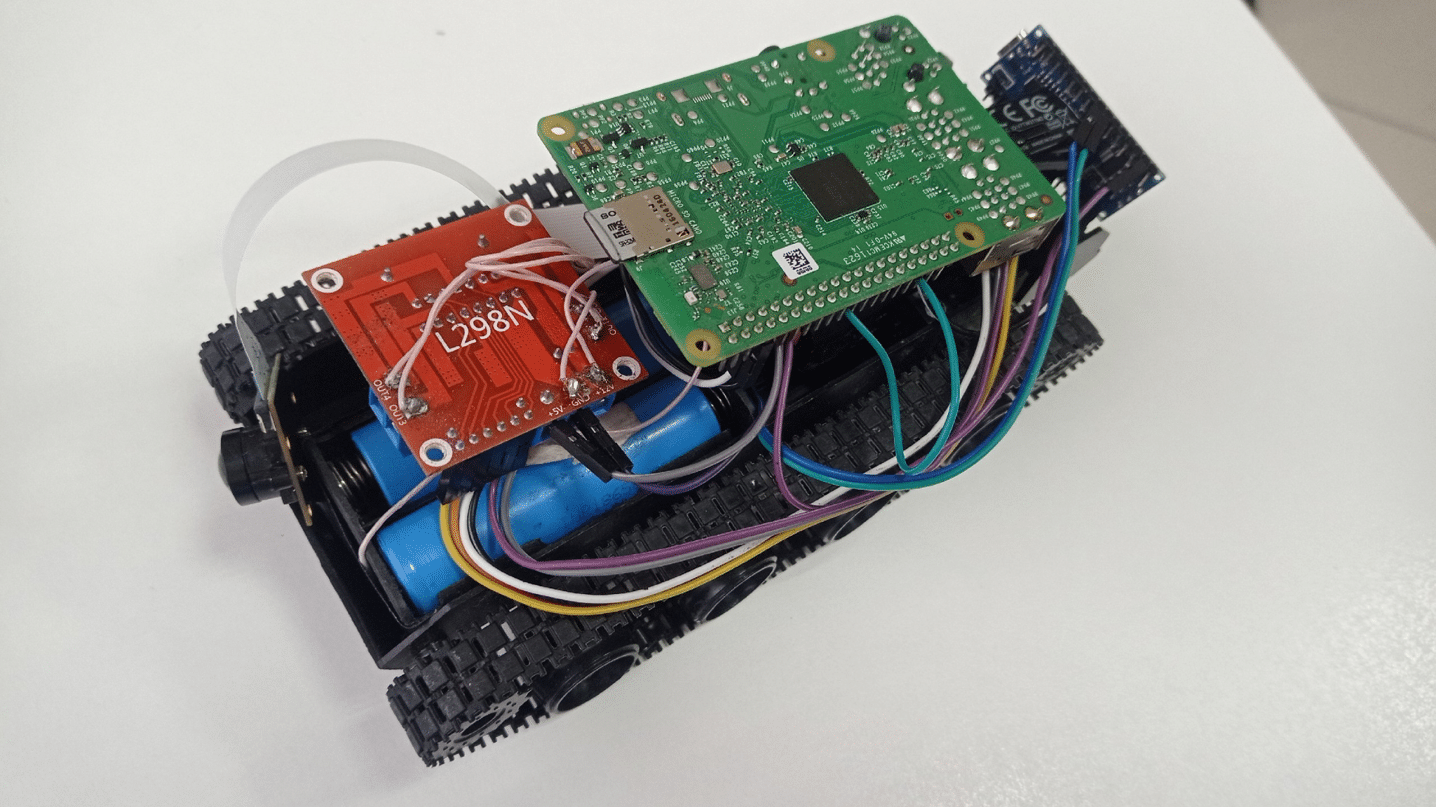
Политехники отмечают, что для реализации идеи требуется большая исследовательская база, один из важнейших пунктов в которой – поиск оптимального метода быстрого построения карты местности с помощью подвижных агентов. Именно для решения этой задачи они разработали прототип робота-разведчика. Это модель размером с крупную радиоуправляемую машинку, которая перемещается с помощью гусеничных колес для лучшей проходимости.
Внутри встроены двигатели, система мониторинга с камерой для фиксации происходящего на маршруте, радиомодуль для управления и передачи данных между другими роботами, гироакслерометр, отвечающий за изменение направления и скорости движения.
При исследовании местности важно выбрать алгоритмы, которые оптимизируют временные затраты и повысят уровень производительности всей системы – то есть позволят роботам очищать наибольшую территорию с наименьшим расходом энергоресурсов и времени. Как наиболее подходящие ученые Пермского Политеха выделили алгоритмы «спираль» и «поиск центра местности», где устройства, не пересекаясь, проходят всю территорию от одного угла до центра, чтобы оценить степень загрязненности.
Их работу сравнивали на специальном симуляторе с использованием одного, двух и трех подвижных агентов. Наилучшим оказалась «спираль», так как практически вдвое меньше затрачивается времени на выполнение задачи, а также значительно снижается количество выполненных шагов для обследования пространства.
Реализация предложенного учеными ПНИПУ проекта внесет большой вклад в борьбу с экологическими загрязнениями в лесах, степях и на других крупных территориях. Роботизация обеспечит быстрый и качественный сбор бытовых отходов.
 Telegram
Telegram  Дзен
Дзен Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
Психологи показали, что базовые черты человеческой личности меняются на протяжении жизни не меньше, чем уровень дохода или состояние здоровья. Проанализировав данные более 160 тысяч человек, ученые пришли к выводу, что общепринятое представление о «неизменном характере» ошибочно.
В Тюмени у «Газпром нефти» естественным образом сформировался большой научно-исследовательский кластер. В городе расположено более десятка институтов и образовательных центров, филиалы РАН, а в 2024 году на полную мощность заработал исследовательский центр «Геосфера». Корреспондент Naked Science побывала в Тюмени по приглашению «Газпром нефти». Рассказываем об этом опыте в подробностях.
Команда исследователей из Германии и Турции впервые исследовала ледник на вершине Большого Арарата на высоте более пяти тысяч метров. Две недели в июле 2026 года ученые собирали данные о вечных снегах горы, которые до этого не были тщательно исследованы.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно