Уведомления
Авторизуйтесь или зарегистрируйтесь, чтобы оценивать материалы, создавать записи и писать комментарии.
Авторизуясь, вы соглашаетесь с правилами пользования сайтом и даете согласие на обработку персональных данных.
Роборуку для пэтч-клампа научили мыть микропипетки
Американские ученые создали робота для локальной фиксации потенциала и очищения микропипеток между пробами. Результаты работы опубликованы в журнале Nature Communications.
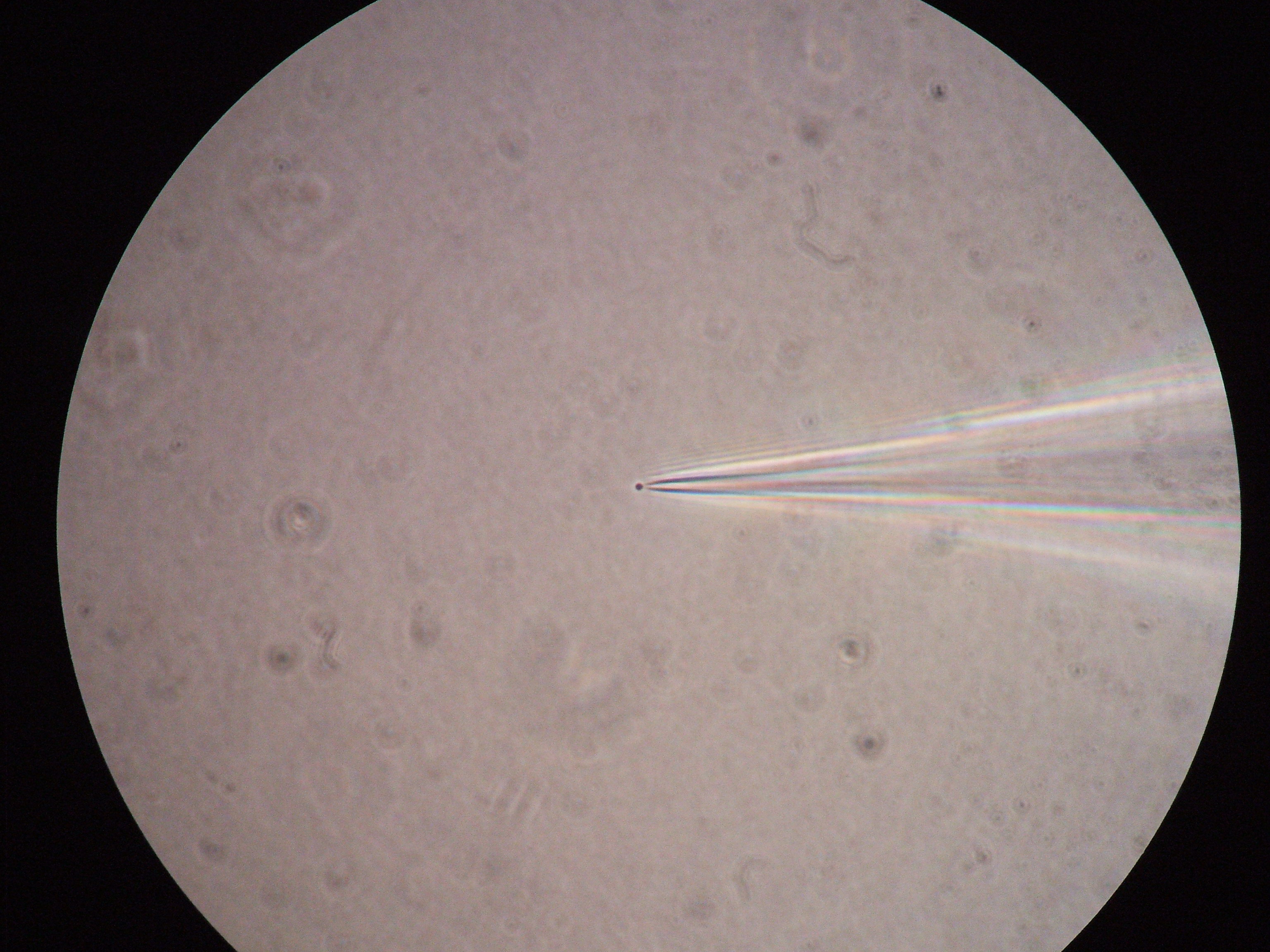
Локальная фиксация потенциала (patch-clamp) — методика для изучения ионных каналов в мембране клеток, впервые была описана в 1981 году. Один из вариантов метода заключается в следующем. В специальную установку помещается микропипетка с электродом, наконечник которой «присасывается» к мембране клетки. В результате изоляции на границе мембраны образуется гигасил — электрическое сопротивление более гигаома, — что позволяет локально регистрировать и контролировать ионные токи между сторонами мембраны. Таким образом изучаются реакции отдельных клеток на электрическое или химическое воздействие.
По словам авторов, несмотря на длительную историю и относительную простоту метод по-прежнему требует активных действий со стороны оператора. После каждой пробы в микропипетке остаются фрагменты мембраны, но поскольку нет механизма, который бы ее очищал, она заменяется на новую — также вручную. Это значительно замедляет процесс.

Ученые из Технологического института Джорджии усовершенствовали метод. По заказу они изготовили систему контроля давления, перепрограммировали стандартные микроманипуляторы и спроектировали графический интерфейс для управления установкой с компьютера. Сам механизм был дополнен двумя ванночками — с моющим средством для лабораторной посуды (Alconox) и с искусственной спинномозговой жидкостью (aCSF). После регистрации токов робот захватывает микропипеткой очиститель (3 нанолитра), через 10 секунд жидкость выталкивается под давлением 1000 микробар и микропипетка наполняется aCSF. Спустя еще 10 секунд выталкивается aCSF, и стерилизованная микропипетка возвращается в исходное положение. Вся процедура очистки занимает около одной минуты.
Система тестировалась на клетках эмбриональных почек человека (HEK293T). В полуавтоматическом режиме авторам удалось изучить участки 84 клеток с помощью восьми микропипеток при точности измерений 95 процентов. При однократной неудачной попытке изоляции мембраны микропипетка очищалась и снова использовалась без ущерба для качества. Ученые подчеркнули, что не проверяли работоспособность микропипеток после десяти использований. Предполагается, что после 26 повторных проб и трех последовательных неудач они приходят в негодность.
Кроме того, авторы испытали установку на нейронах живой мыши. С помощью четырех пипеток они сделали 10 успешных замеров (в этом случае измерялась разность потенциалов целых клеток) из 34, в 13 пробах был достигнут нужный уровень сопротивления. Общая продолжительность эксперимента составила 171 минуту.
«Это шаг к революционным роботизированным технологиям в области нейробиологии. Мы бы хотели оставлять образцы в нашей установке и уходить, пока машина делает пробы 50 или 100 нейронов. Такой вид автоматизации уже доступен, например, в молекулярной биологии, и он значительно расширяет возможности для изучения мозга», — сообщил соавтор работы Крэйг Форест (Craig Forest).

 Telegram
Telegram  Дзен
Дзен Ученые давно знают как с хорошим приближением прогнозировать рост поверхностей. Но экспериментально подтвердить точное соответствие реальных процессов и модели — гораздо более сложная задача, у которой, тем не менее, есть решение.
На Меркурии может появиться первый в истории «вечный рассвет»: ученые предложили отправить туда планетоход, который будет постоянно ехать вдоль границы дня и ночи. Подход открывает путь к изучению одного из самых загадочных миров Солнечной системы без риска разрушительного перегрева.
Микробиологи вырастили неизвестный ранее вид Асгард-архей из гиперсоленых микробных матов и впервые сделали 3D-снимки их прямого физического контакта с симбиотическими бактериями. Анализ томограмм показал встречное структурное движение: археи формируют сложную сеть из нитей и отпочковывающихся мембранных пузырьков, а бактерии прокладывают к этой сети прямые белковые нанотрубки. Визуализация подтверждает гипотезу о том, что эукариотические клетки возникли в результате тесного физического и метаболического переплетения двух микроорганизмов.
Когда международная экспедиционная группа, исследующая море Уэдделла в Антарктиде на борту ледокола «Поларштерн», попыталась укрыться от шторма, ученые и экипаж судна удивились внезапному появлению острова, не обозначенного ни на одной морской карте.
Ученые давно знают как с хорошим приближением прогнозировать рост поверхностей. Но экспериментально подтвердить точное соответствие реальных процессов и модели — гораздо более сложная задача, у которой, тем не менее, есть решение.
Окаменелые остатки рептилии возрастом 289 миллионов лет сохранили полное анатомическое устройство грудной клетки ранних покорителей суши. Благодаря нетронутым хрящам исследователи реконструировали механику первого полноценного реберного дыхания. Наличие в тканях оригинальных белков подтвердило, что сложные органические молекулы способны сохраняться в палеонтологической летописи почти на 100 миллионов лет дольше, чем считалось.
В парках некоторых стран все чаще можно заметить странную картину: синицы и воробьи вместо пуха и веточек приносят в клювах сигаретные окурки. Орнитологи из Польши решили выяснить, зачем птицы выстилают гнезда мусором, пропитанным никотином. Оказалось, пернатые нашли способ использовать вредную человеческую привычку для защиты своего потомства. Но, как это часто бывает в природе, у медали есть обратная сторона.
Марсоход «Персеверанс» обнаружил в камнях на кромке кратера Езеро спектральные признаки минерала корунда, из которого на Земле образуются рубины и сапфиры. Такие спектры на Красной планете зарегистрировали впервые. Теперь ученые пытаются понять, при каких процессах он мог там сформироваться, ведь условия на Марсе заметно отличаются от тех, в которых корунд обычно образуется на Земле.
Четыре человека, летящие к Луне, столкнулись с целым рядом мелких неприятностей — от низкой температуры в начале работы до поломки мочевыводящей системы туалета на вторые сутки и необходимости взамен пользоваться пакетами. К счастью, пока самые крупные сложности удалось компенсировать. Но все они вместе могут сдвинуть ситуацию к решению, о котором Naked Science уже говорил в нашем видеоподкасте о миссии: не исключено, что при высадке астронавтов на Луне их корабль состыкуют со Starship не на окололунной, а уже на околоземной орбите.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно




Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии