Уведомления
Авторизуйтесь или зарегистрируйтесь, чтобы оценивать материалы, создавать записи и писать комментарии.
Авторизуясь, вы соглашаетесь с правилами пользования сайтом и даете согласие на обработку персональных данных.
Двурукие роботы ускорят работу онлайн-магазинов
Ученые из Калифорнии разработали новый механизм распределения и упаковки предметов, который может быть эффективно применен роботами на больших коммерческих складах.
Электронная коммерция продолжает развиваться, достигнув новых уровней после недавнего праздничного сезона. Для оперативного выполнения огромного объема разнообразных заказов такие компании, как Amazon, Walmart и Alibaba, делают немалые вложения в свои склады. Многие компании рассматривают роботов в качестве восполнения недостающей рабочей силы. Однако робототехника пока не очень хорошо справляется с большим разнообразием продуктов.
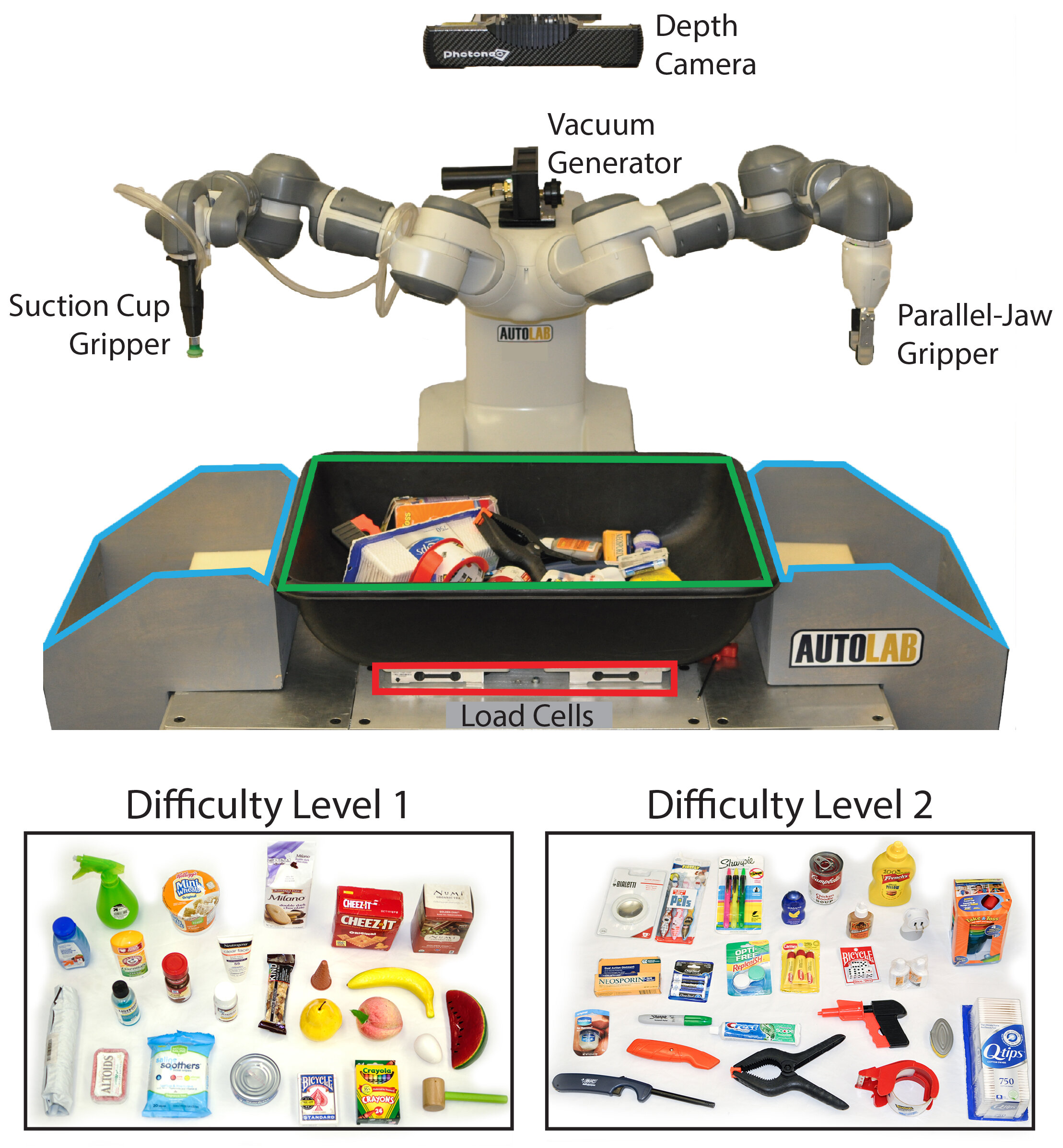
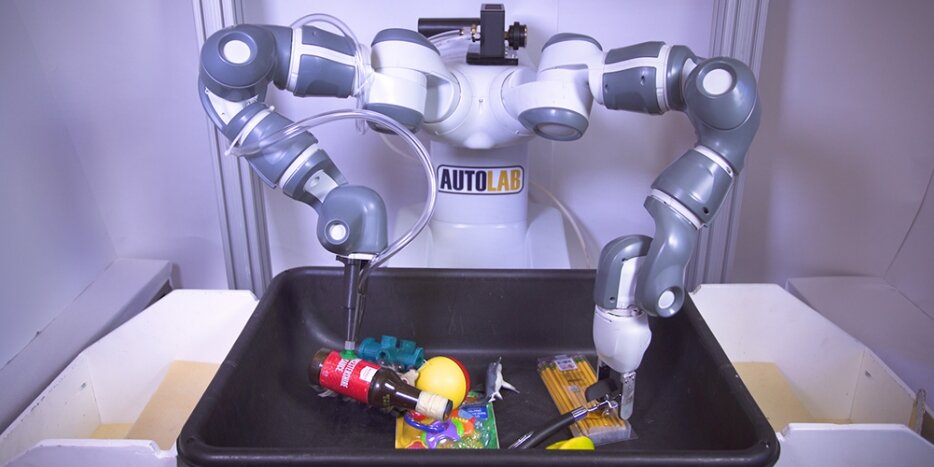
В статье, опубликованной в журнале Science Robotics, инженеры из Калифорнийского университета в Беркли представили новаторский «двурукий» подход к работе с продуктами разных форм, без предварительной подготовки.
«Ни один единичный захват не может справиться со всеми объектами, — говорит исследователь и ведущий автор исследования Джефф Малер. — Например, присоска не может поставить печать на пористые объекты вроде одежды, а манипуляторы с двумя параллельными челюстями не могут взять некоторые инструменты или игрушки за обе стороны».
Роботизированные системы, используемые в большинстве центров электронной коммерции, основаны на вакуумных захватах, которые могут ограничивать диапазоны захватываемых ими объектов. В новой работе ученые представили «двурукий» подход, совместимый с различными типами манипуляторов. Этот подход основан на распространенной «функции вознаграждения» для каждого типа манипуляторов, рассчитывающей вероятность успешного выполнения задачи каждым захватом. Это позволяет системе быстро решать, какой манипулятор использовать в определенной ситуации. Для эффективного расчета функции вознаграждения для всех типов манипуляторов в статье описан процесс обучения функциям вознаграждения посредством тренировки на больших синтетических наборах данных.
Когда исследователи тренировали функции вознаграждения для манипулятора с параллельными челюстями и манипулятора с присоской у двурукого робота, они обнаружили, что их система очистила корзины с 25 незнакомыми объектами со скоростью выше 300 объектов в час с 95-процентной надежностью.
«Когда вы на складе собираете пакеты для доставки, объекты сильно различаются, — говорит Кен Голдберг из Калифорнийского университета в Беркли. — Нам нужны разные захваты для работы с разными предметами».
Существует несколько гипотез о том, как на самом деле древние египтяне строили свои пирамиды. Если о способах возведения монументальных сооружений и инструментах, которые использовали строители, более-менее известно, то о методах доставки блоков и их установки мнения разнятся. Команда французских архитекторов и египтологов изучила ландшафт вокруг самой древней из сохранившихся египетских пирамид — Джосера — и рассказала, как египтяне могли доставлять и поднимать камни для ее строительства.
Эпоксидные смолы известны своей прочностью, устойчивостью к химическим воздействиям и хорошими электрическими свойствами. Такие полимеры используют в качестве основы красок, покрытий, клеев и изоляционных материалов. Однако их применение ограничено высокой вязкостью. Ученые ПНИПУ синтезировали низковязкую, но прочную эпоксидную смолу. Разработка откроет новые горизонты ее использования, избавит от потребности применять разбавители и станет модификатором более высоковязких существующих смол без понижения механических характеристик. Например, клей и краска станут более устойчивыми.
В прошлом ИИ-системы выполняли определенный набор задач, а при появлении новых их нужно было переобучать. На это уходили дополнительные финансовые и вычислительные ресурсы. Открытие лаборатории исследований искусственного интеллекта T-Bank AI Research и Института AIRI меняет ситуацию. Ученые первыми в мире создали модель в области контекстного обучения (In-Context Learning), которая на нескольких примерах сама может учиться новым действиям.
Человек множеством способов загрязняет природу вокруг себя, преимущественно воду. В Мировой океан попадают как отходы с производств, так и тонны пластикового мусора. Все это способно отравлять жизнь морских животных, особенно редких вроде акул. Одним из малоизученных токсичных источников можно назвать наркотики, в частности кокаин. Случайное употребление этого вещества акулами раньше только предполагали, но теперь бразильские биологи нашли прямые доказательства.
Международная команда исследователей с участием ученых из НИУ ВШЭ изучила, как люди, владеющие двумя языками (билингвы), ассоциируют время с пространством. Оказалось, что и в первом, и во втором языке они связывают прошлое с левой частью пространства, а будущее — с правой. При этом чем выше уровень владения вторым языком, тем сильнее выражена эта связь.
Существует несколько гипотез о том, как на самом деле древние египтяне строили свои пирамиды. Если о способах возведения монументальных сооружений и инструментах, которые использовали строители, более-менее известно, то о методах доставки блоков и их установки мнения разнятся. Команда французских архитекторов и египтологов изучила ландшафт вокруг самой древней из сохранившихся египетских пирамид — Джосера — и рассказала, как египтяне могли доставлять и поднимать камни для ее строительства.
Необычный биологический вид, по оценке авторов новой научной работы, пригоден для заселения четвертой планеты без каких-либо предварительных условий — уже в том виде, в котором он существует сейчас. Поскольку речь идет о фотосинтетическом организме, он способен нарабатывать существенное количество кислорода. Интересно, что кандидат на терраформирование Марса сохранил жизнеспособность после месяца в жидком азоте.
Falcon 9 Block 5 впервые за три сотни запусков дал частично неудачный полет. Ракета выводила 20 спутников компании SpaceX, с 15 связь уже пропала, еще пять могут быть потеряны в ближайшее время.
Авторы нового исследования впервые показали, что круглые провалы в лунной поверхности не просто близки к многокилометровым пещерам на естественном спутнике Земли, но и располагают тоннелями, ведущими в глубину.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Мы скоро прочитаем его и свяжемся с Вами по указанной почте. Спасибо за интерес к проекту.
Понятно
Последние комментарии