#роботы
Линейные двигатели приводят в движение электрический транспорт, лифты высотных зданий, металлорежущее оборудование, транспортировочные конвейерные ленты, сваебойные молоты и даже бионические протезы. Их преимущество в том, что для перемещения по прямой линии не нужны дополнительные механизмы — шестерни, рейки или цепи. Но иногда при обработке деталей сложной формы, выполнении некоторых манипуляций в робототехнике, перекосах и неровностях движения необходимо перемещение по криволинейной траектории. Не каждая конструкция агрегата способна сделать это эффективно и без лишних колебаний. Ученые Пермского Политеха проанализировали три вида моделей линейного двигателя и выяснили, какой из них лучше всего справляется с поставленной задачей.

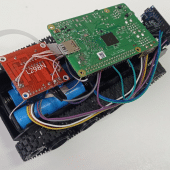
Экологическое загрязнение — одна из основных проблем современности. Сегодня для борьбы с ней ведутся активные разработки роботов, которые быстро и тщательно очищают территории от мусора. Уже успешно применяются автоматические пылесосы и устройства для уборки городских улиц. Однако большие и сложные зоны, вроде лесов и степей, нуждаются в более нестандартных и индивидуальных решениях. Ученые Пермского Политеха работают над проектом по созданию роботов для качественной очистки таких объектов. Идея заключается в распределении нагрузки между несколькими машинами. Это обеспечит эффективное исследование сложной местности и сбор мусора без лишней потери энергии.
Группа российских ученых из МФТИ, Сколтеха и НИЦ искусственного интеллекта Университета Иннополис разработала революционный алгоритм для решения сложной задачи децентрализованной оптимизации.

По мнению экспертов британского строительного гиганта Balfour beatty, в 2050 году на стройках будут работать команды из роботов, дроны начнут постоянно сканировать состояние площадки и определять возможные риски, а люди — дистанционно управлять происходящим с помощью 3D и 4D-данных. Хотя пока до выполнения таких прогнозов довольно далеко, развитие строительной отрасли уже движется в сторону автоматизации и экономичности. Достижения в этой области уже позволили задуматься о повторении некоторых технологических процессов строительства даже на Луне. Ученые Московского авиационного института приступили к созданию технологии по спеканию лунного грунта как потенциального строительного материала для перспективных жилых модулей. В случае успеха исследований отпадет необходимость везти тяжелые строительные материалы с Земли. Это станет важным шагом к освоению внеземных пространств и созданию долговременных колоний за пределами самой планеты. О том, каких успехов с применением ИИ-технологий в строительной отрасли уже удалось достичь и какой они открывают потенциал для развития, в рамках форума «РОСТИМ» рассказал специалист МАИ, директор по развитию бизнеса НТЦ «Платформа» Петр Манин.

С каждым годом роботы становятся все совершеннее и совершеннее, и все активнее внедряются в мир людей. Перед учеными сегодня стоит задача не только добиться максимальной эффективности, но и обеспечить комфортное и безопасное взаимодействие двух миров. Чего мы достигли и куда двигаться дальше? Какова роль фундаментальной науки применительно к робототехнике? Чем мы можем гордиться и где брать специалистов? Ответы на эти вопросы вы найдете в интервью профессора РАН, доктора технических наук Романа Валерьевича Мещерякова, главного научного сотрудника Института проблем управления имени В. А. Трапезникова РАН.

Модель поможет выявить эффективные режимы полета и протестировать методы управления устройством с помощью алгоритмов искусственного интеллекта. Полученные данные станут основой для серийных биоморфных летающих беспилотников. Работа выполнена коллективом из Московского физико-технического института, Нижегородского государственного университета имени Н.И. Лобачевского и Балтийского федерального университета имени И. Канта.

Первая успешная посадка на поверхность Венеры произошла в далеком 1970 году. С этого времени и до сих пор на самую близкую к Земле планету отправляют исключительно автоматические космические аппараты, чей алгоритм работы определяется компьютерными программами. Почему туда до сих пор не летают космонавты и есть ли хотя бы теоретическая возможность это сделать? На эти вопросы ответил эксперт из МАИ, старший преподаватель кафедры «Космические системы и ракетостроение» Иван Рудой.

Ученые НовГУ разработали роботизированный комплекс, обеспечивающий доврачебное самообследование пациента на предрасположенность к раковым заболеваниям. Стационарный прибор установлен в ИНТЦ «Интеллектуальная электроника — Валдай».

Что собой представляет социальный робот, какие функции он может успешно выполнять уже сейчас и каковы перспективы развития робототехники в нашей стране? О настоящем и будущем социальных роботов рассказал профессор МАИ, кандидат технических наук Николай Ким.

В авиационной, машиностроительной, приборостроительной, горно-нефтяной и металлургической промышленности важным этапом производства ответственных изделий считается изготовление и обработка отверстий, пазов и других поверхностей. Для этого применяют электроэрозию — один из самых высокоэффективных и перспективных способов, который позволяет обрабатывать материал с помощью импульсов электрического тока. На производстве получение качественного продукта включает в себя проведение нескольких методов обработки изделия и его очистки. Но сейчас для каждой технологической операции используют свое оборудование, из-за чего весь процесс занимает много времени и ресурсов. Ученые Передовой инженерной школы Пермского Политеха разработали роботизированное устройство для электрофизической прошивки отверстий, которое позволяет проводить комплексную обработку изделия на одном оборудовании.

Исследователи из Китая разработали мультирецепторную кожу, вдохновленную утконосом. Она способна на расстоянии определять приближение объекта и его внешний материал.

Студенты Университета МИСИС представили прототип улучшенного домашнего робота-пылесоса, который в отличие от существующих пользовательских моделей эффективнее справляется с работой в труднодоступных местах. Для этого в устройство встроен механизм всасывания по всей ширине корпуса и функция автоматической замены салфеток влажной уборки.

Старший научный сотрудник лаборатории теоретической фольклористики Президентской академии Дарья Радченко на основании записей в российских социальных медиа проанализировала, по какому принципу люди выбирают имена для роботов-пылесосов. Исследовательница установила, что в основном они присваиваются произвольно, но чаще всего это человеческие имена: робот-пылесос становится в некотором роде членом семьи или домашним питомцем. В некоторых случаях гаджету дают имя человека, к которому владелец устройства испытывает неприязнь.

Выживание организмов в природе зависит от их способности адаптироваться к изменениям окружающей среды. Например, некоторые водоросли двигаются к источнику света для фотосинтеза. Бактерии перемещаются к более концентрированным участкам с химическими веществами, чтобы находить питание. Еще один пример такого поведения — биоконвекция — процесс самоорганизации, при котором организмы распределяют тепло равномерно по всему сообществу. Подобное явление наблюдается у пингвинов — они собираются в плотную стаю и перемещаются так, чтобы каждый успел согреться, побывав в самом теплом участке. Ученые ПНИПУ смоделировали такой эффект в группе роботов, каждый из которых выделяет тепло и движется в точку поля с наибольшей температурой. Выяснилось, что они способны циркулировать в пространстве подобно живым организмам.




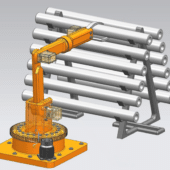
Автоматизация технологических процессов на предприятиях стала неотъемлемой частью работы во многих отраслях промышленности. В этом помогают роботы. Один из ключевых аспектов роботизации — создание производственного манипулятора. Это сложное устройство, которое предназначено для подъема, перемещения, сортировки и сборки предметов. Внедрение таких манипуляторов позволит ускорить производство и повысить его качество. Важный этап создания подобных устройств — моделирование. Ученые ПНИПУ разработали модель манипулятора для повышения цеховой производительности за счет автоматизации процесса обработки и перемещения больших валов.
В малых реках обитают рыбы семейства лососевых, причем в каждой может жить собственная популяция. Регулярно они приплывают на нерест, мечут икру и погибают. Мальки вылупляются из икринок и спустя время возвращаются в ту же самую реку. Такая ситуация характерна для многих регионов России, включая Сахалин. Особенности поведения этих рыб делают их ловлю очень легкой и привлекательной для браконьеров. Государство охраняет рыбные ресурсы, но проследить за всеми реками и ручьями практически невозможно. Если не застать браконьера за ловом, доказать незаконность наличия при нем рыбы сложно. Чтобы решить проблему, ученые Пермского Политеха разрабатывают робототехнический комплекс для мониторинга и предотвращения браконьерской деятельности.

Частная космическая компания Intuitive Machines, которая недавно смогла посадить свой модуль «Одиссей» в южном приполярном регионе Луны, объявила о разработке нового аппарата. На этот раз инженеры компании создадут прыгающего робота для исследования постоянно затененных районов земного спутника и неровной поверхности, в том числе крутых склонов, кратеров и возвышенностей — сложных участков, которые в будущем инженеры могут использовать под строительство лунных баз.


Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии