Робота научили представлению о собственности и социальных нормах
Поскольку робототехника становится все более распространенным явлением, важно научить робота не только общаться с людьми, но и делать это надлежащим образом, а ключевой аспект человеческого взаимодействия — понимание и поведение в соответствии с социальными и моральными нормами.
Команда исследователей из Йельского университета разработала роботизированную систему, способную представлять, изучать и выводить отношения собственности и нормы. Их работа, опубликованная на сайте arXiv.org, рассматривает некоторые сложные проблемы, связанные с обучением роботов социальным нормам и тому, как их соблюдать.
Нормы обладания — это набор социальных норм, которые помогают ориентироваться в общей среде так, чтобы быть более внимательным к другим. Обучение этому роботов может улучшить их взаимодействие с людьми, позволяя различать не принадлежащие и принадлежащие им инструменты, которые передаются под их контроль лишь на некоторое время.
«Мы с коллегами сосредоточены на создании таких роботов, с которыми людям будет максимально легко взаимодействовать. Часть этой работы посвящена изучению того, как мы можем научить машины общим социальным концепциям — вещам, которые важны для людей: пониманию права собственности или просьбе попользоваться тем или иным объектом. Эти темы не получают должного внимания, а между тем будут иметь принципиальное значение для работы роботов в наших домах, школах и офисах», — рассказывает один из авторов исследования Брайан Скасселлати (Brian Scassellati).
В разработанном инженерами подходе собственность представляется как график отношений между объектами и их владельцами. Эта информация объединяется с базой данных, основанной на предикатах норм, ограничивающих действия, которые робот может выполнять с использованием принадлежащих ему объектов.
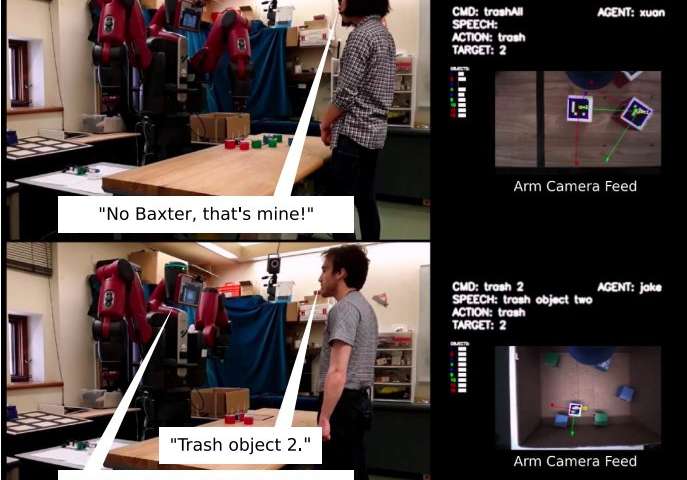
По словам ученых, одной из главных проблем в этой работе стало то, что один человек узнает о владельце предмета из четких инструкций, например когда слышит фразу «не бери мои инструменты», а другой узнает это лишь на опыте. Комбинирование двух типов обучения может быть легким для людей, но представляется трудной задачей для роботов.
Система, разработанная инженерами, сочетает в себе новый инкрементный алгоритм обучения нормам, способный как на однократное обучение, так и на индукцию из примеров с байесовским выводом отношений собственности в ответ на очевидные нарушения правил. Вместе эти компоненты позволяют системе изучить нормы собственности и модель поведения, приемлемую в тех или иных ситуациях.
Оценить успешность своей работы исследователям предстояло в серии смоделированных и реальных экспериментов. Они обнаружили, что робот способен эффективно взаимодействовать с объектами, которые требуют соблюдения различных норм собственности, продемонстрировав при этом замечательную компетентность и гибкость в принятии решений.
Исследование, проведенное Скасселлати и его коллегами, представляет собой яркий пример того, как можно научить роботов уважать социальные человеческие нормы. В дальнейших исследованиях аналогичный метод может применяться для изучения машинами других способностей, связанных с нормами, и позволит им решать сложные ситуации, в которых разные традиции или цели находятся в конфликте друг с другом.
 Telegram
Telegram  Дзен
Дзен Хотя тротиловый эквивалент взрыва от удара был умеренным, всего несколько тонн, благодаря рыхлости лунного грунта низких широт он может поднять до 400 тонн пыли. Она способна образовать облако высотой в десятки километров. Астрономы надеются провести наблюдения этого события и, возможно, зафиксировать какие-то особенности выброшенного лунного материала.
Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
После десятилетий неожиданного повышения плотности атмосфера Плутона начала замерзать. К такому выводу ученые пришли, проанализировав данные наблюдений, выполненных с 2017 по 2023 год. Открытие указывает на начало новой фазы сезонного цикла карликовой планеты.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Остров Пекан недалеко от Мексиканского залива в Луизиане вскоре перейдет в собственность компании Илона Маска. Здесь будет новый космодром для Starship, почти в 20 раз больше, чем в Бока-Чике, где уже стоят две стартовых площадки. Уникальное местоположение позволит компании попытаться реализовать амбициозную цель о запуске миллиона низкоорбитальных спутников на орбиты, где сегодня находится подавляющее меньшинство спутников Земли.
Команда исследователей из Германии и Турции впервые исследовала ледник на вершине Большого Арарата на высоте более пяти тысяч метров. Две недели в июле 2026 года ученые собирали данные о вечных снегах горы, которые до этого не были тщательно исследованы.
Долгое время считалось, что до прихода европейцев тропические леса Амазонии были заселены сравнительно плохо. Однако выяснилось, что плотная растительность скрывает большинство следов древних обществ. С помощью воздушного лазерного сканирования ученые обнаружили сотни неизвестных земляных сооружений и предположили, что около двух тысяч лет назад население юго-западной части Амазонии могло достигать трех миллионов человек.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно





Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии