Российские ученые приблизили робота к автономной работе
Ученые КНИТУ-КАИ получили свидетельство о государственной регистрации программного модуля обучения коллаборативного робота-манипулятора. Роботизированную систему обучили захватывать различные нестандартные объекты, что имеет практическое значение в народном хозяйстве — при сортировке на конвейерах, в сборочном производстве, при сборе урожая. Уникальность предлагаемого решения в том, что система способна обучаться новым операциям без участия программиста, используя визуальные данные и цифровую модель робота.

Проект «Интеллектуальные роботизированные системы на базе компьютерного зрения и машинного обучения» реализован в казанском вузе в рамках программы «Приоритет-2030» национального проекта «Наука и Университеты».
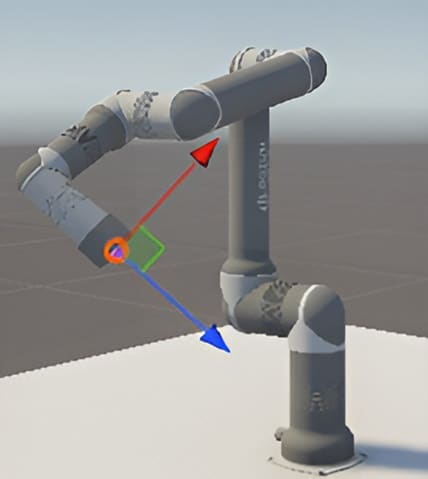
Исследователи из Казани создали проект для 6-осевого коллаборативного робота: в виртуальной среде его учат «хватать» неизвестные объекты неопределенной формы, а затем в реальности он выполняет задание без серьезных сбоев. Надо сказать, что действие роботизированных систем в неоднородной среде или в контакте с людьми выходят за рамки привычного программирования, ведь традиционные алгоритмы управления не обладают необходимой гибкостью.
Задача — «натаскать» робота самостоятельно ориентироваться и формировать стратегию управления без жесткого программирования. Здесь, совсем как у ребенка, постигающего мир, проводником выступил бы эмпирический опыт. Этот метод формирования поведения робота называется «обучение с подкреплением» (RL, Reinforcement Learning). Робот действует как игрок в видеоигре: пробует варианты, учится на ошибках и сам находит лучшие ходы. Но тогда придется проводить миллионы тренировочных эпизодов, что нереально и с точки зрения потраченного времени, и с точки зрения сохранности используемого оборудования. Поэтому на практике применяется известная парадигма Sim2Real, при которой обучение проводится в виртуальной среде и затем передается реальному роботу. Такой подход снижает стоимость экспериментов, ускоряет обучение и позволяет изменять параметры среды, чего трудно достичь в реальных условиях.
Дополнительный вызов — интеграция RL с компьютерным зрением в единой архитектуре: обучение на «сырых» изображениях усложняет интерпретацию ошибок. Поэтому предпочтительны модульные системы, где модуль восприятия выдает структурированные данные (например, 6D-позу объекта), а RL-модуль фокусируется на стратегиях движения. Это ускоряет конвергенцию и повышает надежность Sim2Real, но несет риски: ошибки восприятия передаются контроллеру, а в реальности возникают сдвиги в данных датчиков и контактах. Для их устранения используют адаптацию к предметной области и дообучение на реальных данных.
«Ключевой проблемой в обучении на основе симуляций считается так называемый «Sim2Real разрыв», который возникает из-за несоответствий в динамике, освещении, сенсорном шуме у физической среды и ее виртуального «двойника», — поясняет руководитель проекта, доцент кафедры автоматики и управления КНИТУ-КАИ Полина Лазарева. — Были предложены различные методы для устранения этого разрыва. Наиболее распространенным является рандомизация предметной области, которая вносит случайные возмущения в параметры моделирования. Такие характеристики, как длина, масса, центр тяжести, коэффициенты трения и шум датчика подлежат рандомизации, что вынуждает оператора разрабатывать надежную политику, способную работать в изменяющихся условиях».
Необходимо отметить, что несмотря на заметный прогресс в сокращении разрыва в Sim2Real, большинство найденных разработчиками по всему миру решений по-прежнему требуют значительных вычислительных ресурсов и тщательной настройки.
Сочетание компьютерного зрения и методов обучения с подкреплением в рамках единой архитектуры управления — перспективное направление исследований, уверены разработчики из КНИТУ-КАИ.
По задумке казанских ученых, политика формируется с помощью RL и curriculum learning в среде Unity ML-Agents, а затем переносится в реальную систему без значительного разрыва. «Мы разработали систему, которая объединяет компьютерное зрение и обучение с подкреплением, чтобы роботы могли обучаться действиям в симуляции и выполнять их в реальности, — уточняет Полина Лазарева. — Это решение устраняет разрыв между моделированием и промышленным применением, делая роботов по-настоящему адаптивными и автономными».
В итоге решение включает модуль распознавания и определения 6D-позы объектов (координаты + ориентация в пространстве), цифровую модель робота и среды в Unity, где агент обучается захвату и манипуляции объектами, а также перенос обученного поведения в реального робота (Sim2Real), обеспечивающий адаптивность к реальным условиям. Таким образом робот сможет подстраиваться под новые задачи без ручного перепрограммирования.
Инновационность предлагаемого учеными КНИТУ-КАИ решения заключается в использовании единой цепочки «компьютерное зрение → симуляция → обучение с подкреплением → перенос в реальный мир для автономного захвата объектов».
По словам разработчиков, по сравнению с традиционными методами настройки в 2-3 раза сокращаются затраты времени и средств на внедрение коллаборативных роботов.
Ожидаемый результат — быстрая, надежная стратегия управления с минимальной донастройкой на реальном роботе, открывающая путь к коллаборативным приложениям.

 Telegram
Telegram  Дзен
Дзен Нейробиологи и специалисты по микробиологии выяснили, что нарушения в видовом составе кишечных бактерий (так называемый дисбиоз) и изменение уровня продуктов из жизнедеятельности могут ключевым образом влиять на уровень стресса, включая депрессию, тревожные состояния и посттравматическое стрессовое расстройство.
Сегодня на земле существует примерно 7500 языков, однако ученые давно подозревали, что в прошлом их было значительно больше. Международная группа лингвистов реконструировала историю языкового разнообразия за последние 12 тысяч лет и пришла к выводу, что человечество уже пережило «золотой век» языков, после которого их число начало быстро сокращаться.
Правильно подобранные звуковые последовательности способны не только стимулировать рост растений, но и влиять на их урожайность. К такому выводу пришли авторы нового исследования. Они разработали технологию, которая позволяет воздействовать на процессы развития растений через акустические сигналы без использования генной инженерии или химикатов. В экспериментах добились повышения урожайности мяты, сои, болгарского перца и конопли.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?
В позднеантичном Риме императорским указом мужчинам запретили носить длинные волосы. Автор нового исследования пришел к выводу, что введение этого запрета объяснялось необходимостью сохранения римской идентичности в условиях усиливающегося распада империи и нарастающего торжества варваров.
Виктор Гловер, один из четырех человек, весной этого года пролетевших мимо Луны, выступил на конференции NASA и предложил резко изменить план высадки американцев на Луне в конце десятилетия. Он считает, что это позволит снизить риски для астронавтов-участников миссии.
Вселенная может оказаться «замкнутой» глобальной структурой, где свет от далеких галактик способен возвращаться к наблюдателю с разных направлений. Именно такой сценарий не удалось исключить авторам нового масштабного обзора. Проверить его предсказания астрономы смогут уже в ближайшие годы.
Ученые впервые на молекулярном уровне доказали, что обычная вода одновременно состоит из двух разных жидких состояний — более плотного и менее плотного, которые непрерывно сменяют друг друга. Раз молекулярная «двойственность» действительно существует, это подтверждает спорную 30-летнюю гипотезу. Новое открытие поможет, наконец, объяснить десятки «странных» физических аномалий воды, включая ее расширение при замерзании и парадоксальное изменение вязкости под давлением.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно