#роботы-манипуляторы
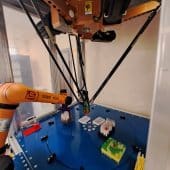
Российские ученые представили универсальный алгоритм для координации движений манипуляторов в медицинских роботизированных системах для исключения столкновений в ограниченном пространстве. Алгоритм анализирует рабочую зону, определяет ограничения, связанные с совместной работой внутри системы, адаптирует траекторию и оптимизирует движения для увеличения эффективности.
Роботы-манипуляторы — это промышленные установки, которые выполняют функции человеческой руки. Их активно используют на различных серийных производствах, в частности в металлообработке, автомобилестроении, фармацевтике и многих других. В зависимости от программы, манипуляторы способны выполнять широкий спектр задач, тем самым улучшая условия труда и снижая расходы предприятий. При этом со все большим внедрением подобных установок в промышленность возникает спрос на высококвалифицированные кадры с навыками робототехники. Ученые Пермского Политеха запатентовали инновационный учебный робот-манипулятор для обучения молодых специалистов основам программирования и управления промышленными роботизированными установками.
Линейные двигатели приводят в движение электрический транспорт, лифты высотных зданий, металлорежущее оборудование, транспортировочные конвейерные ленты, сваебойные молоты и даже бионические протезы. Их преимущество в том, что для перемещения по прямой линии не нужны дополнительные механизмы — шестерни, рейки или цепи. Но иногда при обработке деталей сложной формы, выполнении некоторых манипуляций в робототехнике, перекосах и неровностях движения необходимо перемещение по криволинейной траектории. Не каждая конструкция агрегата способна сделать это эффективно и без лишних колебаний. Ученые Пермского Политеха проанализировали три вида моделей линейного двигателя и выяснили, какой из них лучше всего справляется с поставленной задачей.

В современной робототехнике существует проблема сортировки объектов, хаотично расположенных в рабочей зоне манипулятора. Один предмет может полностью или частично закрывать другой, и тогда роботу будет сложно захватить нужный из них, не затронув другие или не повредив захватное устройство. В МТУСИ предложили алгоритм, основанный на нейронной сети и RGB-D сенсоре, позволяющий определить объект захвата с применением промышленного манипулятора.


Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно







Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии