Робототехники объяснили аномальную ловкость многоножек
Ученые из Университета Киото разработали математическую и роботизированную модель многоножки, которая прояснила особенности локомоции этих животных. Результаты исследования опубликованы в Scientific Report.
Многоножки — надкласс наземных членистоногих с длиной тела от 2 до 32 миллиметров и числом ног до 750. Теоретически такое количество конечностей должно создавать пропульсивную и замедляющие силы, снижающие их маневренность. Несмотря на это отдельные представители подтипа, в частности Scutigera coleoptrata (Обыкновенная мухоловка), способны развивать скорость до 40 сантиметров в секунду. При этом многоножки ловко преодолевают препятствия.
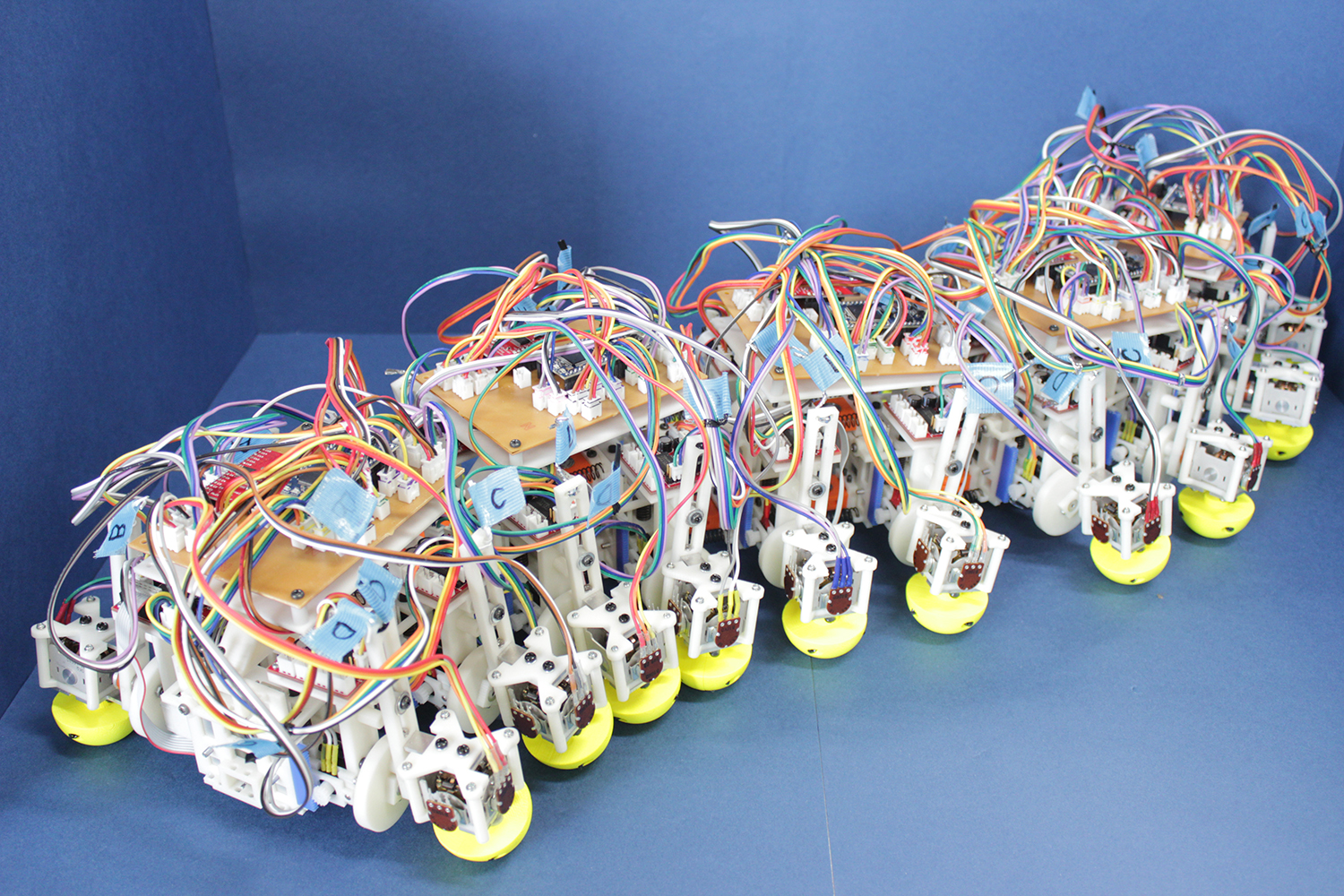
Для устранения противоречия исследователи создали компьютерную и после — роботизированную модель многоножки общей длиной 1,35 метра. Устройство состояло из шести сегментов, объединенных пятью сочленениями вертикальной оси и торсионными пружинами. Каждый сегмент был оснащен парой двусуставных ног для передвижения, ноги на головном блоке имели дополнительное сочленение для ориентации тела с помощью лазерного сканера с дальномером. Соединение сегментов было пассивным, но суставы ног приводились в движение двигателями.
Шаг робота состоял из двух действий: описания ногой полуокружности и перемещения «стопы». В первоначальном варианте передние направляющие «стопы» перемещалась в плоскости параллельной телу, показатель жесткости на кручение у пружин составлял 450 ньютон-миллиметров на градус. При такой конфигурации все сегменты двигались только по прямой линии. Затем жесткость на кручение пружин в передних ногах была снижена до 7,3 ньютон-миллиметровов на градус. В результате ученым удалось добиться аутентичного искривления тела многоножки.
Авторы уточнили, что такая локомоция позволила суставчатоногому роботу сохранять динамическое равновесие. В основе его волнообразнового движения лежала суперкритическая бифуркция Андропова — Хопфа, в данном случае она проявлялась в том, что тело достигало периодической устойчивости за счет пиковых значений дисбаланса в статичном положении. Ключевым условием динамического равновесия робота стала высокая скорость движения.
«Это исследование дает ключ к решению вопросов, связанных пониманием двигательных функций животных, и осмысленному подходу в рамках биологических наук», — заявил соавтор работы Синья Аои.
По его словам, в дальнейшем подобные эксперименты позволят улучшить моторику роботов — вне зависимости от количества их конечностей.
 Telegram
Telegram  Дзен
Дзен Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?
Авторы нового исследования повторно изучили останки шести представителей египетской царской семьи, которые жили примерно четыре тысячи лет назад, и благодаря современным методам анализа получили сведения об этих людях, недоступные ученым прошлого.
Большой коллектив ученых из Специальной астрофизической обсерватории РАН (п. Нижний Архыз), Астрокосмического центра ФИАН, Крымской астрофизической обсерватории РАН, Санкт-Петербургского государственного университета и МФТИ с коллегами впервые провел комплексный многоволновой анализ переменности блазара Тон 599 за период с 1983 по 2025 год и обнаружил в этих данных скрытый ритм, указывающий на работу двух взаимосвязанных механизмов.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?
Власти штата Нью-Йорк ввели на год мораторий на строительство крупных дата-центров. Таким образом, Нью-Йорк стал первым штатом, где действует такое ограничение.
Пентагон совместно с ФБР опубликовал новый массив из 40 секретных документов и 19 видеозаписей, фиксирующих НЛО. Глава Консультативного совета при Белом доме, гарвардский астрофизик Ави Леб изучил обнародованные кадры и попытался объяснить природу самого странного из запечатленных объектов.
Вселенная может оказаться «замкнутой» глобальной структурой, где свет от далеких галактик способен возвращаться к наблюдателю с разных направлений. Именно такой сценарий не удалось исключить авторам нового масштабного обзора. Проверить его предсказания астрономы смогут уже в ближайшие годы.
Ученые впервые на молекулярном уровне доказали, что обычная вода одновременно состоит из двух разных жидких состояний — более плотного и менее плотного, которые непрерывно сменяют друг друга. Раз молекулярная «двойственность» действительно существует, это подтверждает спорную 30-летнюю гипотезу. Новое открытие поможет, наконец, объяснить десятки «странных» физических аномалий воды, включая ее расширение при замерзании и парадоксальное изменение вязкости под давлением.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии