Роботы учатся естественной ходьбе через «ощущение» собственного тела
Самопознающие алгоритмы и гибкие суставы помогают роботам совершать плавные движения.
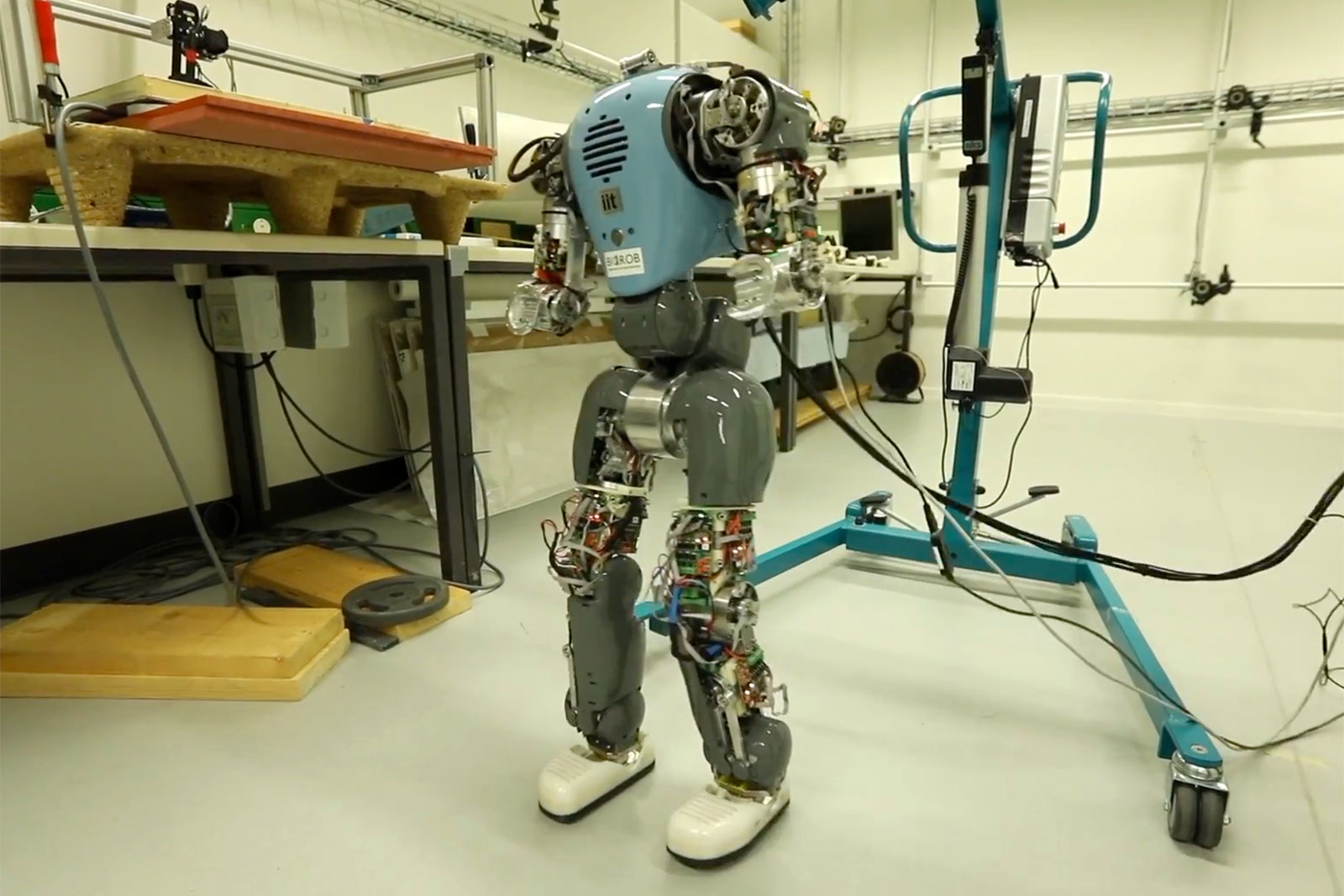
Проблема с двуногими роботами заключается в том, чтобы научить их естественной походке. Человекоподобные роботы склонны очень быстро попадать в «неприятности», например, опрокидываться или разными частями задевать другие предметы. Швейцарские исследователи считают, что могут изменить сложившуюся ситуацию. Они работают над безголовым роботом COMAN, предназначенным для максимально естественной ходьбы. Теперь робот обладает более плавными движениями благодаря сочетанию более гибких эластичных суставов и алгоритма управления, который помогает боту «ощутить» свое собственное тело.
COMAN знает о симметрии в своей динамике и структуре, что помогает ему не только ходить намного естественнее, но и переносить объекты, двигаясь по неровным поверхностям, таким как лестница. Кроме того, робот может реагировать на неожиданности. Например, если толкнуть робота, он будет точно знать, как поставить ногу, чтобы не упасть.
Эта технология еще далека от создания роботов, с которыми можно будет взаимодействовать любым способом. В первую очередь роботу COMAN понадобится «голова» или любой другой способ исследования окружающего пространства. Исследователи также изучают возможность обучения роботов совместным действиям, таким как перемещение различных объектов. Возможно, в скором будущем мы увидим роботов, несущих рояль по лестнице.
 Telegram
Telegram  Дзен
Дзен Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?
Авторы нового исследования повторно изучили останки шести представителей египетской царской семьи, которые жили примерно четыре тысячи лет назад, и благодаря современным методам анализа получили сведения об этих людях, недоступные ученым прошлого.
Большой коллектив ученых из Специальной астрофизической обсерватории РАН (п. Нижний Архыз), Астрокосмического центра ФИАН, Крымской астрофизической обсерватории РАН, Санкт-Петербургского государственного университета и МФТИ с коллегами впервые провел комплексный многоволновой анализ переменности блазара Тон 599 за период с 1983 по 2025 год и обнаружил в этих данных скрытый ритм, указывающий на работу двух взаимосвязанных механизмов.
Очереди на заправках стали привычным явлением в России, а на фоне информационного вакуума от властей о конкретных показателях производства бензина в июне население вынуждено ориентироваться на слухи. Все это выглядит довольно странно, но есть нюанс: скорее всего, кризис уже начинает выдыхаться. Как именно мы это выяснили?
Пентагон совместно с ФБР опубликовал новый массив из 40 секретных документов и 19 видеозаписей, фиксирующих НЛО. Глава Консультативного совета при Белом доме, гарвардский астрофизик Ави Леб изучил обнародованные кадры и попытался объяснить природу самого странного из запечатленных объектов.
«Терра Нова» — последний корабль знаменитого полярного исследователя Роберта Фалкона Скотта. Судно затонуло в 1943 году, а в 2026 году экспедиция получила его первые трехмерные изображения.
Вселенная может оказаться «замкнутой» глобальной структурой, где свет от далеких галактик способен возвращаться к наблюдателю с разных направлений. Именно такой сценарий не удалось исключить авторам нового масштабного обзора. Проверить его предсказания астрономы смогут уже в ближайшие годы.
Ученые впервые на молекулярном уровне доказали, что обычная вода одновременно состоит из двух разных жидких состояний — более плотного и менее плотного, которые непрерывно сменяют друг друга. Раз молекулярная «двойственность» действительно существует, это подтверждает спорную 30-летнюю гипотезу. Новое открытие поможет, наконец, объяснить десятки «странных» физических аномалий воды, включая ее расширение при замерзании и парадоксальное изменение вязкости под давлением.
Видеосервисы стали неотъемлемой частью жизни россиян. В 2026 году охваты большинства платформ продолжают расти, в том числе YouTube.

Вы попытались написать запрещенную фразу или вас забанили за частые нарушения.
Понятно
Что-то в вашем комментарии показалось подозрительным, поэтому перед публикацией он пройдет модерацию.
Понятно
Из-за нарушений правил сайта на ваш аккаунт были наложены ограничения. Если это ошибка, напишите нам.
Понятно
Наши фильтры обнаружили в ваших действиях признаки накрутки. Отдохните немного и вернитесь к нам позже.
Понятно






Мы скоро изучим заявку и свяжемся с Вами по указанной почте в случае положительного исхода. Спасибо за интерес к проекту.
Понятно
Последние комментарии