Группа ученых из Южной Кореи и Сингапура разработала автономную систему, которая позволяет управлять перемещением черепахи с помощью робота.
©Wikipedia
Несмотря на развитие робототехники, существующие модели роботов обладают рядом недостатков. Так, в условиях высокой влажности их датчики и актуаторы могут быть повреждены, кроме того, запас аккумуляторов у таких устройств конечен. Для доставки роботов в труднодоступные места ученые рассматривают возможность использования животных. В 2016 году сотрудники Корейского института передовых технологий (KAIST) и Исследовательского института инфокоммуникации Сингапура представили метод, позволяющий оператору удаленно управлять движениями черепахи посредством нейроинтерфейса.
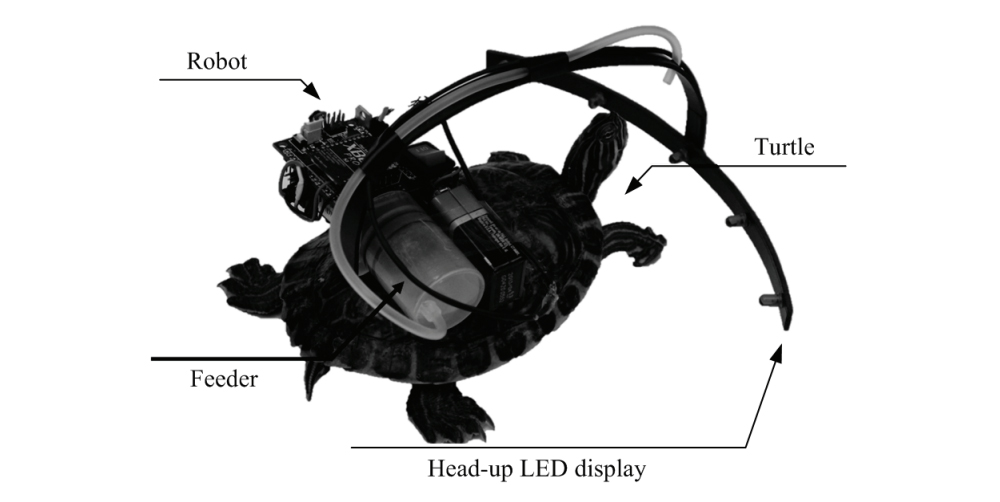
В рамках экспериментов на панцирь животного прикрепляли стимулирующее устройство и видеокамеру. С помощью мысленных команд, передаваемых по Wi-Fi, оператор мог поворачивать черный полуцилиндр с прорезью по опорной плоскости, частично закрывая обзор рептилии. Поскольку, согласно прошлым экспериментам, последние воспринимают черный цвет как препятствие, их направление движения изменяется. В новой статье ученые описали систему управления, которая не предусматривает участия оператора. Основанная на принципах паразитизма, она состоит из трех модулей: контроля, стимуляции и вознаграждения.
Для стимуляции авторы использовали четыре светодиода, прикрепленные на полукруглой раме с шагом в 30 градусов на уровне глаз животных. Активация светодиода должна была указывать направление движения, при этом радиомодем и микроконтроллер сверяли целевую траекторию с углом поворота головы и движением черепахи. При условии, что последнее соответствует команде системы, в рот рептилии с помощью мотора и шприца выдавливалась гелеобразная пища. Все модули прикреплялись к панцирю посредством эпоксидной смолы. Технология тестировалась на пяти особях в резервуаре с водой.
По условиям эксперимента, животные должны были последовательно пересечь пять точек общим расстоянием пять метров. Результаты показали, что система «робот-паразит — черепаха» позволяет успешно контролировать перемещение рептилий, несмотря на то, что в среднем пройденная ими дистанция превышала заданную — около 7,18 метра. По мнению исследователей, представленный подход может быть распространен на других животных, в том числе рыб или птиц. Предполагается, что система может использоваться в целях разведки или наблюдения на труднодоступных территориях.
В дальнейших работах авторы намерены испытать технологию в естественных условиях и усовершенствовать ее, в частности сократить влияние на животных внешних факторов: конечной целью заявлено полное сосредоточение особи на командах системы. Кроме того, в перспективе робот-паразит может быть доработан с учетом возможных препятствий и построения оптимальных маршрутов. Между тем ранее американские ученые опубликовали протокол создания миниатюрных биороботов, которые приводятся в движение за счет воздействия на модифицированные миобласты. Документ могут использовать все желающие.
Статья опубликована в журнале The Journal of Bionic Engineering.

Комментарии
Ничего себе технологии какие в 2017м