Ученые из Калифорнии разработали новый механизм распределения и упаковки предметов, который может быть эффективно применен роботами на больших коммерческих складах.
©Wikipedia
Электронная коммерция продолжает развиваться, достигнув новых уровней после недавнего праздничного сезона. Для оперативного выполнения огромного объема разнообразных заказов такие компании, как Amazon, Walmart и Alibaba, делают немалые вложения в свои склады. Многие компании рассматривают роботов в качестве восполнения недостающей рабочей силы. Однако робототехника пока не очень хорошо справляется с большим разнообразием продуктов.
В статье, опубликованной в журнале Science Robotics, инженеры из Калифорнийского университета в Беркли представили новаторский «двурукий» подход к работе с продуктами разных форм, без предварительной подготовки.
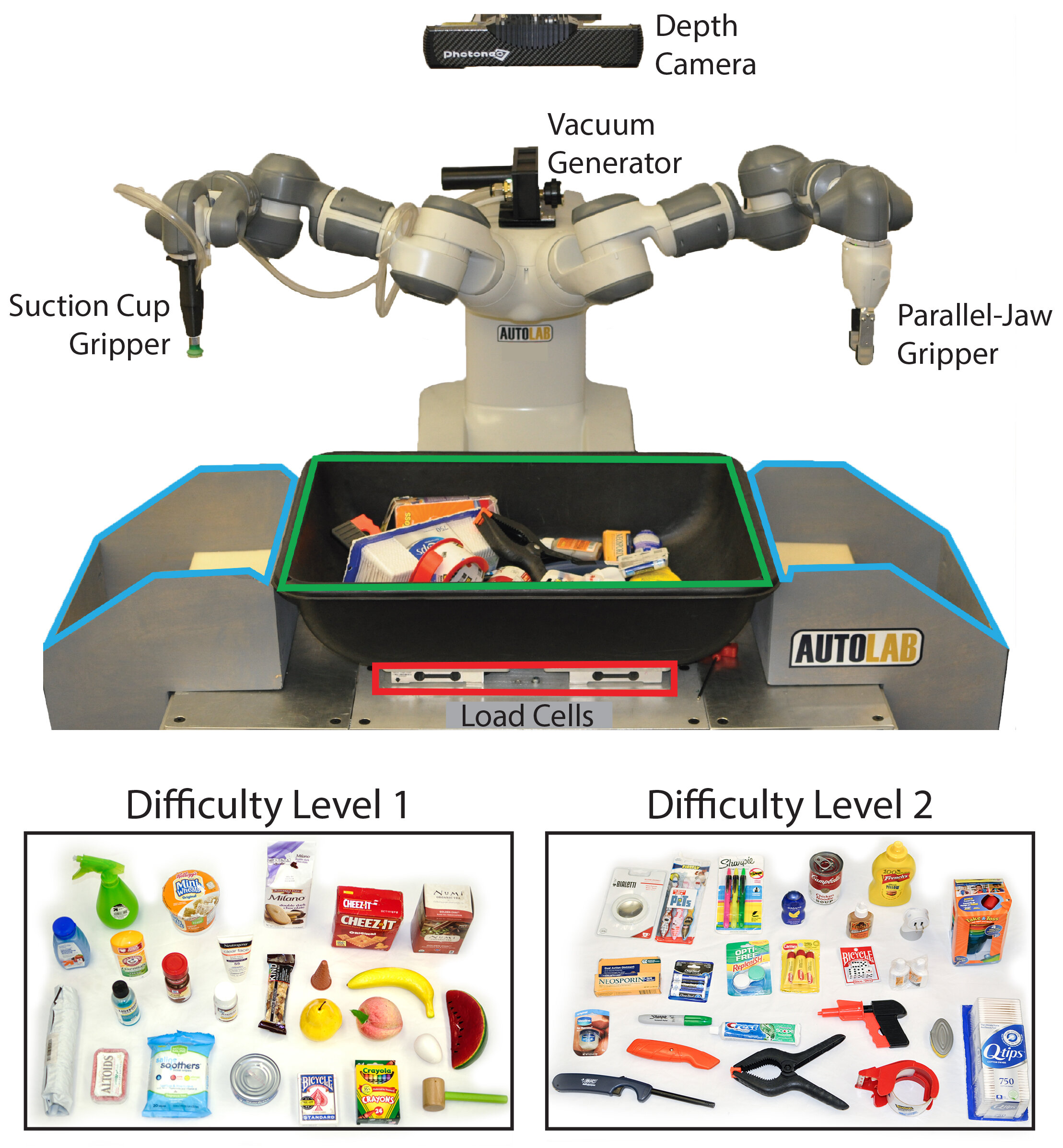
«Ни один единичный захват не может справиться со всеми объектами, — говорит исследователь и ведущий автор исследования Джефф Малер. — Например, присоска не может поставить печать на пористые объекты вроде одежды, а манипуляторы с двумя параллельными челюстями не могут взять некоторые инструменты или игрушки за обе стороны».
Роботизированные системы, используемые в большинстве центров электронной коммерции, основаны на вакуумных захватах, которые могут ограничивать диапазоны захватываемых ими объектов. В новой работе ученые представили «двурукий» подход, совместимый с различными типами манипуляторов. Этот подход основан на распространенной «функции вознаграждения» для каждого типа манипуляторов, рассчитывающей вероятность успешного выполнения задачи каждым захватом. Это позволяет системе быстро решать, какой манипулятор использовать в определенной ситуации. Для эффективного расчета функции вознаграждения для всех типов манипуляторов в статье описан процесс обучения функциям вознаграждения посредством тренировки на больших синтетических наборах данных.
Когда исследователи тренировали функции вознаграждения для манипулятора с параллельными челюстями и манипулятора с присоской у двурукого робота, они обнаружили, что их система очистила корзины с 25 незнакомыми объектами со скоростью выше 300 объектов в час с 95-процентной надежностью.
«Когда вы на складе собираете пакеты для доставки, объекты сильно различаются, — говорит Кен Голдберг из Калифорнийского университета в Беркли. — Нам нужны разные захваты для работы с разными предметами».
