Использование воды в качестве одного из электродов позволило резко уменьшить размеры мягких плавающих роботов и сделать миниатюрных искусственных скатов.
©Wikipedia
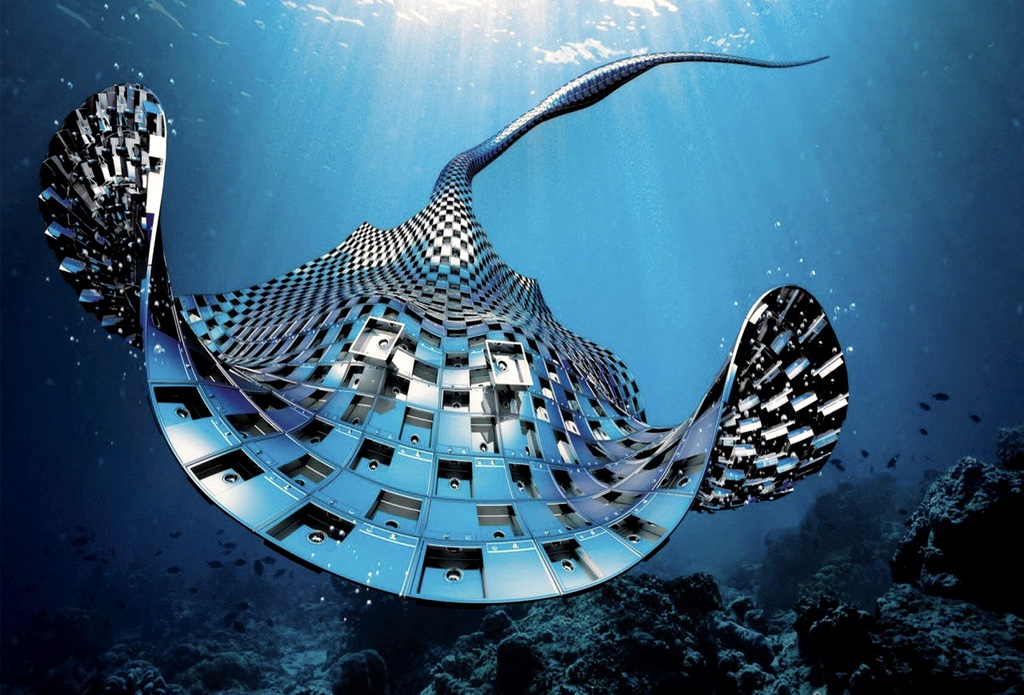
Имитируя движения ската, этот робот не имеет ни двигателя, ни винтовой турбины, однако плавает ловко и быстро. Его создатель, Тефэн Ли (Tiefeng Li) из Чжэцзянского университета, считает, что такие гибкие конструкции будут экономичны и безопасны для исследовательских беспилотных субмарин, которые смогут изучать остатки кораблей и коралловые рифы. Не хуже подойдут мягкие роботы и для составления карт морского дна и разведки под водой.
В статье, опубликованной в журнале Science Advances, Ли и его соавторы описывают плавающий гибкий аппарат с дистанционным управлением. Даже внешне он напоминает мелкого ската весом 90 г, длиной 18,5 см и с крыльями размахом 20 см. Изолированная в силиконе литиевая батарея обеспечивает его энергией на три часа непрерывного плавания. Эта батарея и пара электромагнитов, которые приводят в движение «рулевое управление» хвоста, – единственные жесткие части устройства.
Прозрачные «мускулы» робота выполнены из мягкого диэлектрического эластомера, электроактивного полимера, который меняет форму в зависимости от приложенного к нему напряжения. Это позволяет ему двигать «крыльями» и продвигаться в воде на скорости 6 см/с. Авторы заявляют, что это вдвое быстрее предыдущего рекорда для не связанных проводом аппаратов, хотя пока что и медленней, чем у настоящих скатов. Зато робот показал, что может нести миниатюрную видеокамеру и плавать в воде, температура которой составляет от 0,4 до 74 °C.
Китайским инженерам удалось добиться высокой миниатюризации и долгого времени работы без подзарядки с помощью еще одного оригинального решения. Вместо того, чтобы добиваться полной герметизации электрических компонентов аппарата, они, наоборот, использовали воду в качестве одного из электродов его цепи.
При подаче напряжения на эластомер он приобретает положительный заряд, притягивая электроны из окружающей воды и деформируясь, слегка приподнимая «крылья» робота. Отключение напряжения возвращает ему первоначальную форму, завершая двигательный цикл. Такой подход позволил отказаться от дополнительных слоев изоляции, сделав робота компактнее, легче и гибче.