Американские ученые разработали технологию создания эластичных актуаторов из нейлона. Результаты исследования опубликованы в журнале Advanced Materials.
©Wikipedia
Актуаторы — универсальные исполнительные устройства, которые могут управляться с помощью пульта. Они рассматриваются как основа искусственных мышц роботов, и, поскольку традиционные гидравлические системы являются громоздкими, ученые ищут способы создавать актуаторы из эластичных материалов, например полимеров. В настоящее время искусственные мышцы на базе полимеров, как правило, могут сокращаться, но не сгибаться. Кроме того, их производство, в частности на основе углеродных нанотрубок, является дорогим.
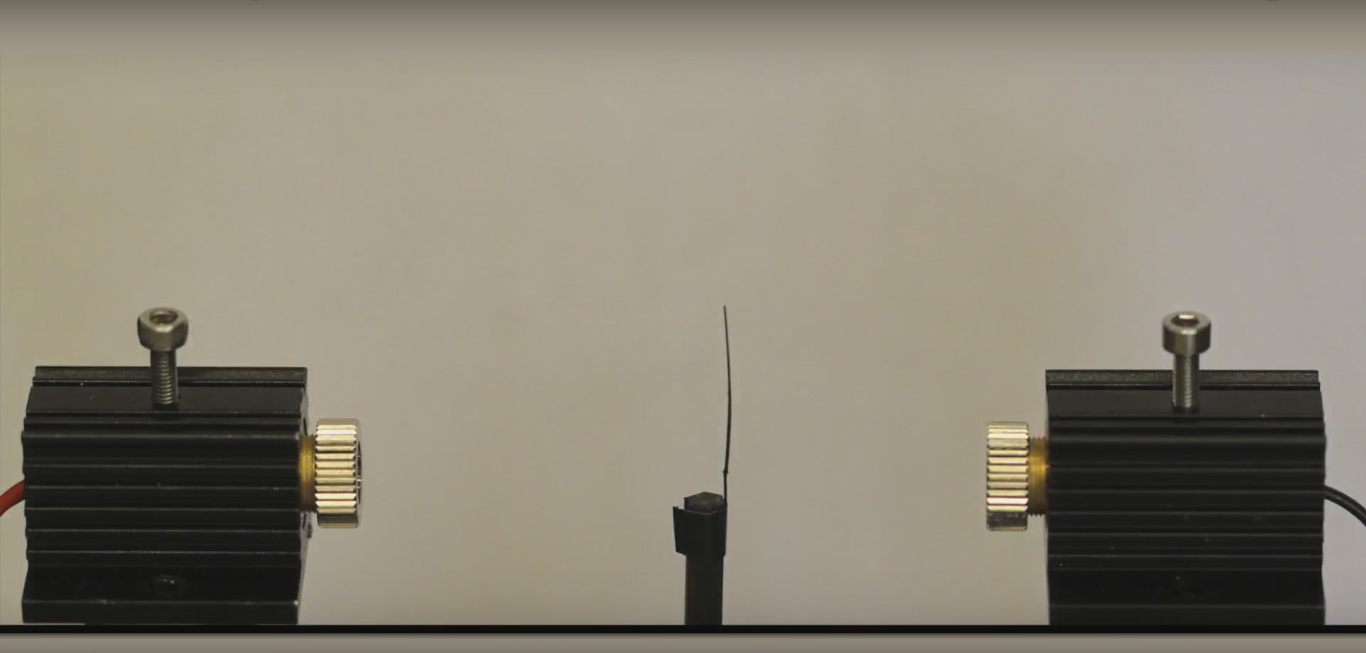
Альтернативой может являеться ориентированный нейлон. При нагревании этот материал ведет себя как мышечные волокна: сокращается и увеличивает свой объем. Ранее исследователи уже экспериментировали с линейными актуаторами на основе нейлона, но такие мышцы только сокращались или растягивались. В новой работе ученые из Массачусетского технологического института использовали нейлоновые нити с прямоугольным сечением, спрессовав обычную рыболовную леску. Затем ее точечно нагревали с различных сторон.
Испытания показали, что при таком нагревании актуатор может сокращаться с одной стороны быстрее, чем с другой, и изгибаться в нужном направлении. Ресурс актуатора составил до 100 тысяч циклов сгибания, что в сто раз превышает показатель углеродных нанотрубок. Частота сгибаний-разгибаний устройства может достигать 17 циклов в секунду. При этом для нагревания можно использовать лазер или токопроводящую краску с графеном, нанесенную на определенные участки искусственных мышц. Это позволит актуатору выполнять даже сложные движения.
