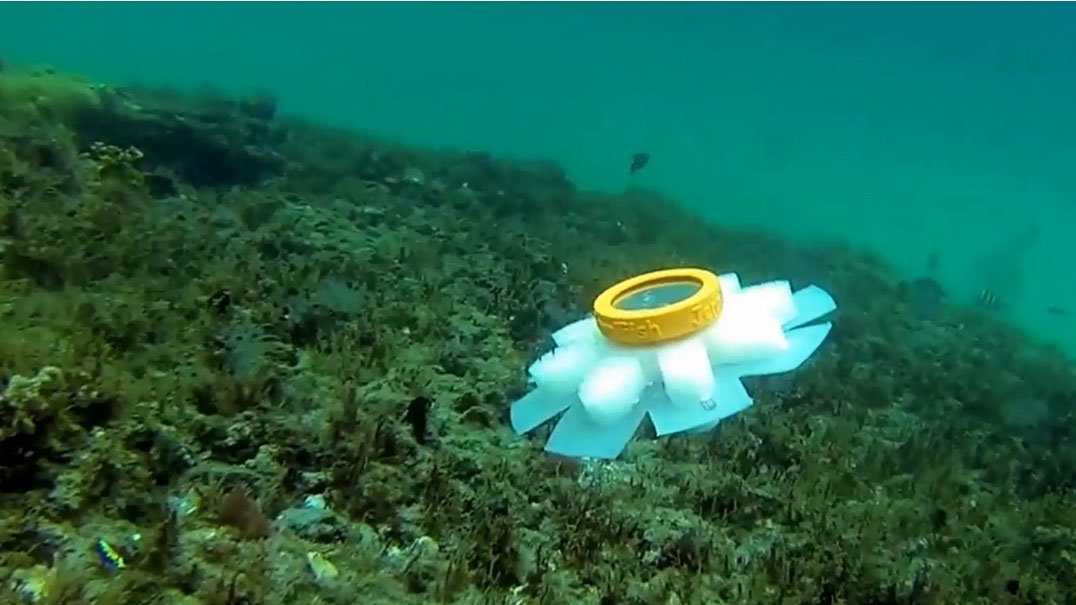
Новая медуза-робот способна наблюдать и заботиться о хрупких частях Мирового океана, не причиняя вреда.
©Wikipedia
Роботов создала команда американских ученых из Флоридского Атлантического университета и Управления военно-морских исследований. Машины могут свободно плавать, передвигаться и проплывать через узкие участки. Исследователи опубликовали работу о своих достижениях в журнале Bioinspiration and Biomimetics.
«Изучение и мониторинг таких хрупких сред, как коралловые рифы, всегда было довольно сложной задачей для морских исследователей. Мягкие роботы обладают большим потенциалом в этом деле, — говорит доктор Эрик Энгеберг. — Биомиметические мягкие роботы, созданные по типу рыб и других морских животных, очень популярны в исследовательском сообществе в последние годы. Медузы могут быть отличными прототипами, так как они хорошие пловцы».
Чтобы сделать своего робота достаточно эффективным, ученые взяли за основу форму ушастой аурелии (Aurelia aurita) на этапе личинки. Тогда как в предыдущих дизайнах медуз-роботов применялись различные механизмы тяги, теперь команда решила использовать гидравлические сети, которые будут приводить машину в движение.
«Главное применение робота — исследование и мониторинг деликатных экосистем, именно поэтому мы используем приводы из гидравлических сетей, чтобы предупредить непреднамеренные повреждения. К тому же живые медузы сами по себе плавучие. Чтобы сымитировать это свойство, мы использовали воду для наполнения приводов гидравлической сети при плавании», — говорит доктор Энгерберг.
Для того чтобы медуза могла маневрировать, команда задействовала два рабочих колеса насоса и накачала восемь щупалец. Дизайн рабочего колеса насоса предоставил открытый поток воды, в котором вода из окружающей среды закачивалась в мягкие приводы для воспроизведения плавательного рывка. Когда насосы отключались, эластичность силиконового материала в приводах щупалец сжимала приводы для обратного выброса воды во время фазы релаксации. Новый дизайн также помог избавиться от винтов, упростив управление, размеры и снизив стоимость разработки.
Команда распечатала пять разных медуз-роботов на 3D-принтере, применив силиконовую резину для приводов. Всех роботов сделали различающимися по жесткости, чтобы испытать влияние этого свойства на эффективность тяги. Ученые также проверили способность робота сжиматься при прохождении через узкие участки, используя для этого круглые отверстия в пластинах из оргстекла.
«Оказалось, роботы могли проплывать через отверстия уже своего номинального диаметра. В контрольный алгоритм робота мы планируем встроить датчики окружающей среды вроде сонара вместе с навигационным алгоритмом. Это поможет ему находить отверстия и определять, может ли он через них проплыть».
