


В последние годы ученые все чаще задействуют принципы оригами при конструировании мобильных элементов и автономных механизмов. Так, в начале года NASA представило складной радиатор для малых спутников, а в июне американские инженеры показали новые одноразовые аккумуляторы для работы в полевых условиях. Похожие устройства предлагаются для медицинских приложений — благодаря программируемому поведению и компактности они могут использоваться в диагностике или адресной доставке препаратов. Об одной из подобных конструкций мы писали ранее: она представляет собой звездообразный филлер, который раскрывается в организме, продлевая введение веществ.
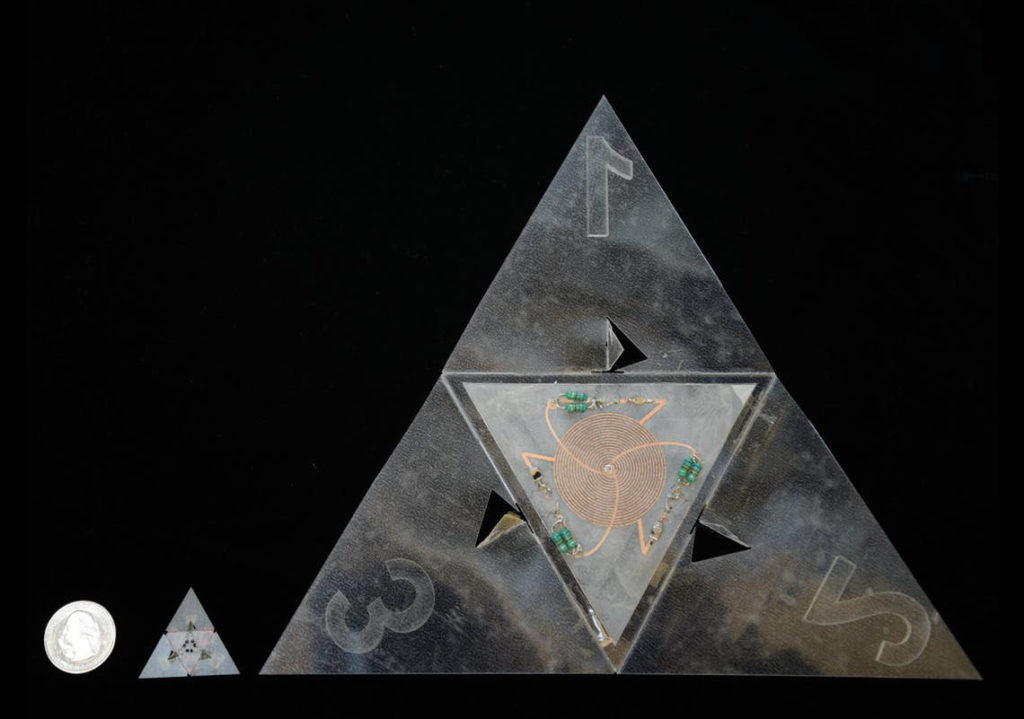
Большинство таких прототипов, тем не менее, зависят от наличия обычной батареи, что делает их громоздкими, или внешнего воздействия, например, светом или магнитным полем. В этом случае исследователям до сих пор не удавалось манипулировать отдельными частями робота. В новой статье специалисты из Гарвардского университета и Университета Аджу описали технологию, которая устраняет этот пробел. Представленные плоские устройства состоят из конечностей, объединенных центральным элементом. В основании каждой конечности расположены миниатюрные электрические схемы из катушек индуктивности и конденсаторов, а также спирали из сплава, имеющего память формы.


Первоначально спирали остаются растянуты, однако при нагревании сокращаются, складывая конструкцию. Эффект достигается за счет переменного магнитного поля, которое генерирует электрический ток в схемах. При этом характеристики последних подобраны таким образом, что позволяют активировать определенные части робота, изменяя частоту поля. Ученые создали несколько типов конструкции, продемонстрировав возможности трех. Первая представляла собой составной треугольник из четырех фигур аналогичной формы; вторая — манипулятор-захват, рассчитанный на взаимодействие с небольшими предметами. Также авторы показали корабль в бутылке, расправляющий парус под воздействием магнитного поля.
По мнению инженеров, технология может найти широкое применение в разных отраслях. В частности, на ее основе может быть разработан робот-эндоскоп для обследования внутренних органов. Стоит отметить, на днях мы писали о таком устройстве. Корпусом для него служит 72-метровая герметичная оболочка, которая способна вытягиваться за счет нагнетания воздуха и деформироваться вслед за гибким стержнем. Помимо медицины прототип в будущем может использоваться для инспекции зданий и в поисково-спасательных операциях. Кроме того, технология является масштабируемой и предусматривает замену оболочки на более жесткие материалы — это позволит задействовать механизм в строительстве опор.
Статья опубликована в журнале Science Robotics.
В июне стало известно о создании модульного робота-оригами, способного формировать структуры произвольных форм.