


Кохлеарный имплантат представляет собой протез, позволяющий компенсировать потерю слуха при нейросенсорной тугоухости — состоянии, которое вызывается повреждением звуковоспринимающего аппарата. Во время операции прибор, устанавливаемый подкожно, подключается к улитке с помощью электродов с одной стороны и к накожному микрофону — с другой. Для проведения электродов к внутреннему уху врачу необходимо просверлить канал диаметром 30 миллиметров, не повредив сохранные структуры и не допустив перепада внутричерепного давления, что требует высокой квалификации.
По статистике, ежегодно в мире проводится около 65 тысяч кохлеарных имплантаций. При этом от 30 до 55 процентов пациентов с нейросенсорной тугоухостью в результате оперативного вмешательства окончательно утрачивают слух. Кроме того, ошибка при установке прибора также может привести к повреждению лицевого нерва, иннервирующего мимические мышцы лица. Поэтому ученые ищут способы автоматизировать процедуру, сократив нагрузку на хирургов и риск дополнительных травм.


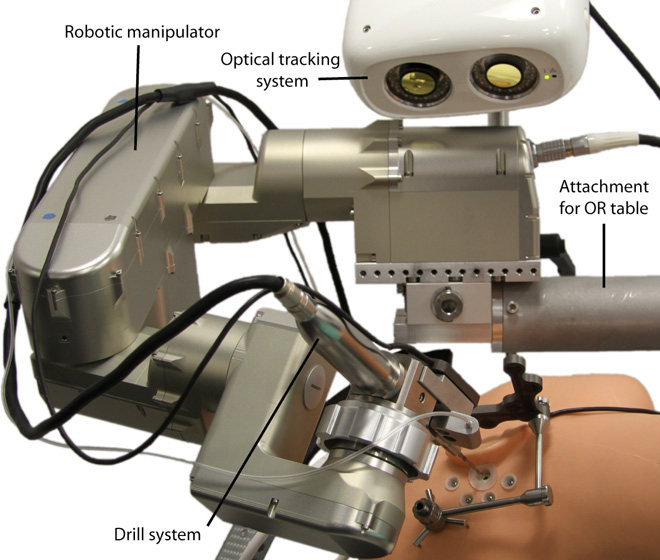
В новой работе ученые из Бернского университета описали медицинского робота для проведения кохлеарных имплантаций в полуавтоматическом режиме. Устройство состоит из манипулятора, оптической системы, позволяющей наблюдать детали операции в высоком разрешении, и хирургической дрели. В рамках испытаний система под наблюдением специалистов определила анатомические особенности звуковоспринимающего аппарата пациента и рассчитала траекторию будущего канала длиной 23 миллиметра, примыкающего к овальному окну.
Перед началом процедуры хирурги сверили расчеты робота и отдали команду на их корректировку. После самостоятельной проверки система скорректировала траекторию сверления и успешно провела операцию. Последующий эндоскопический осмотр показал, что сделанное отверстие получилось точным, ровным и расположено напротив овального окна. При этом точность манипулятора позволила использовать более тонкие сверла: диаметр канала составил 1,8–2,5 миллиметра. Электроды имплантата были установлены врачами.


По словам авторов, в будущем нового робота можно будет использовать не только для сверления каналов, но и для подключения электродов. Предполагается, что это также повысит безопасность и точность операций. Тем не менее, допуску устройства к регулярным процедурам будут предшествовать тщательные испытания.
Роботы-хирурги широко применяются для проведения некоторых операций. Наиболее известная из таких систем, daVinci, ранее помогла китайским специалистам провести первую в стране пересадку матки от матери к дочери. Позднее бельгийские хирурги испытали перспективное устройство, позволяющее в полуавтоматическом режиме проводить операции по лечению окклюзии сетчатки.
В то же время распространение таких технологий вызывает интерес к возможным рискам, связанным с их применением. Так, японские исследователи пришли к выводу, что в долгосрочной перспективе роботы daVinci могут представлять собой угрозу для пациентов. Дело в том, что из-за сложности конструкции очистка этих систем от загрязнителей зачастую не приводит к желаемым результатам.