



Разработка проведена в рамках программы стратегического академического лидерства «Приоритет 2030». На исследование выдан патент.
Изделие для звукопоглощения представляет собой многослойную конструкцию, между внутренними и внешними слоями которой расположен заполнитель в виде сот с жесткими перегородками. Внутренний слой перфорирован, то есть на его поверхности находятся малые круглые отверстия, расположенные в определенном порядке. Шум в виде волн, проходя через отверстия, попадает в сотовые ячейки и после этого рассеивается.
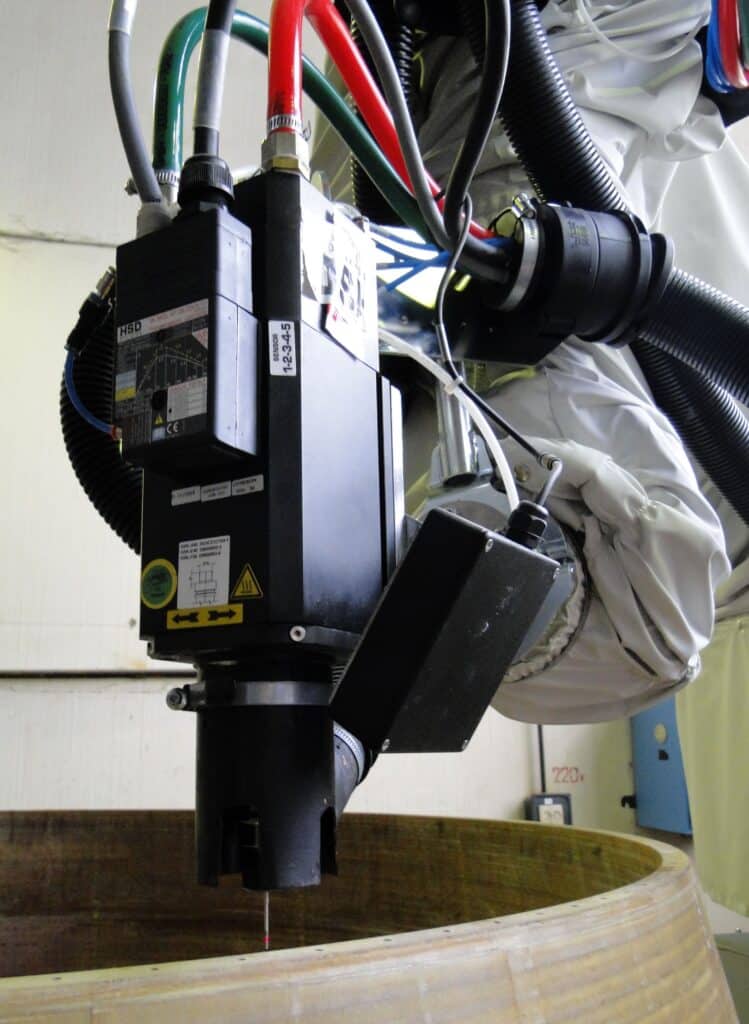
Сейчас изготовление такой конструкции автоматизировано. Если требуется просверлить 2000 отверстий и более диаметром два миллиметра для поглощения шума, осуществлять вручную такую задачу монотонным сверлением нерационально, поэтому на реальном производстве для этого используют робота. Так работа выполняется быстрее и качественнее.

Сам процесс перфорации на первый взгляд довольно простой. Для робота пишется специальная программа, следуя которой, он по порядку перфорирует отверстия. Но так как звукопоглощающее изделие чаще всего имеет структуру с жесткими перегородками внутри, сверление малых отверстий (до трех миллиметров) сложно автоматизировать без чувствительного датчика на режущем инструменте. При этом легко получить брак в изделии и сломать сверло, а его частая замена тормозит производство и экономически невыгодна.
Ученый Пермского Политеха разработал способ регулирования, при котором с помощью тензометрического чувствительного датчика постоянно контролируется такой важный показатель, как осевое усилие – сила, действующая на инструмент при сверлении.
«В память робота мы заранее загружаем заданную величину нагрузки на инструмент. Перемещаем сверло к месту расположения первого отверстия, и робот начинает его вращение до касания поверхности. Тензометрический датчик, установленный на инструменте, непрерывно замеряет фактическую величину осевого усилия, которое возникает при перфорации, и сравнивает с изначально заданной величиной. Если нагрузка на сверло резко увеличивается на 50 процентов и больше, датчик фиксирует обнаружение препятствия и снижает скорость инструмента в два раза. Робот досверливает отверстие до заданной глубины и переходит к следующему», – объясняет доцент кафедры инновационных технологий машиностроения ПНИПУ Александр Дударев.
Снижение скорости подачи инструмента необходимо для уменьшения осевого усилия, чтобы инструмент остался целым. Поэтому при перфорации материала важно постоянно отслеживать этот показатель. Теперь это стало возможно благодаря разработке ученого ПНИПУ. Тензометрический датчик фиксирует скачок нагрузки при сверлении и передает сигнал роботу, чтобы снизить скорость подачи, тем самым предотвращая поломку инструмента.
Исследователь уже опробовал способ для перфораций отверстий звукопоглощающей конструкции и отмечает, что качество полученных отверстий соответствует всем техническим требованиям. Сверла не ломаются при попадании в перегородку, их срок службы существенно повышается. Стойкость увеличивается в 1,5-2 раза.
Разработка ученого Пермского Политеха повышает качество сверления отверстий в изделии с жесткими перегородками, предотвращает брак и поломку инструмента. Благодаря такому способу управления роботом изготовление звукопоглощающих конструкций для авиации будет надежнее и эффективнее.