


Исследование опубликовано в пятом номере журнала «Строительные и дорожные машины» по направлению «Мехатроника, робототехника и робототехнические системы» за 2023 год. Разработка проведена в рамках соглашения с Фондом содействия развитию малых форм предприятий в научно-технической сфере (Фонд содействия инновациям) и программы стратегического академического лидерства «Приоритет 2030».
Роботы могут выполнять диагностику в сложных и труднодоступных местах, снижая возможный риск для жизни и здоровья людей, если речь идет, например, о промышленных трубопроводах. Разработка роботов включает в себя использование новейших технологий и методов, таких как системы навигации и позиционирования, датчики и сенсоры, системы коммуникации и машинное обучение. На данный момент нет оптимальных методов проектирования и моделирования подобных устройств из-за того, что они представляют сложную динамическую систему.
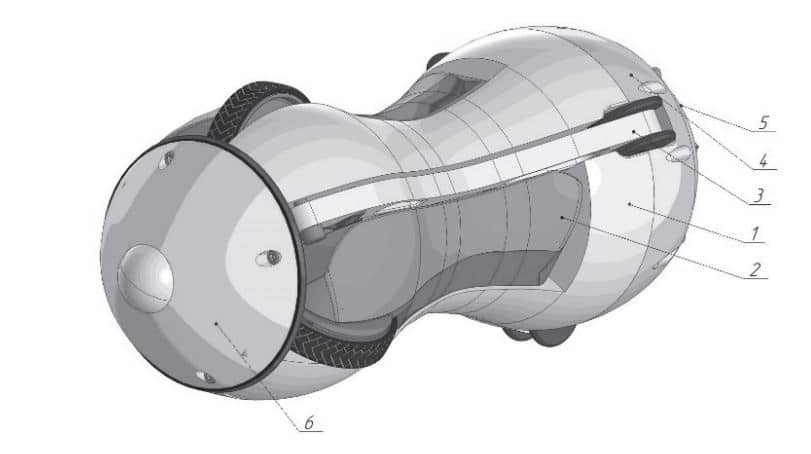
«Механическая конструкция робота содержит несущее основание (корпус), на котором установлена опорная нога с колесным движителем. Опорные ноги расположены относительно друг друга под углом 60 градусов. Для того чтобы каждая опорная нога имела контакт с внутритрубной поверхностью, мы разработали специальную систему рычагов.
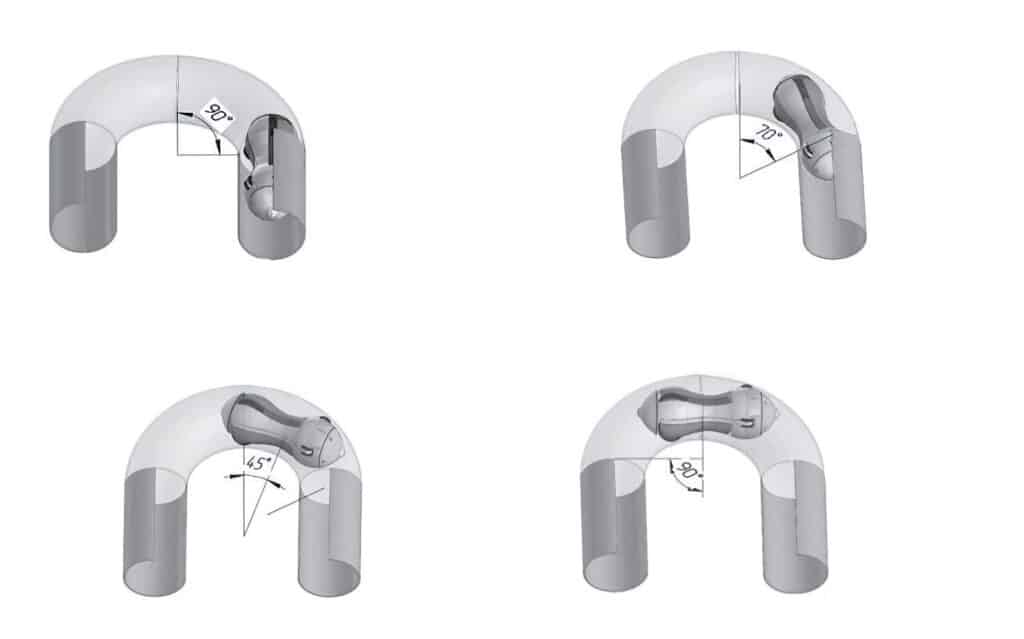
Корпус устройства спроектирован таким образом, что может перемещаться в отводах. В качестве контактного элемента выбран движитель колёсного типа, он испытывает наименьшее сопротивление движению, в отличие от других типов движителей, например, гусеничных», – объясняет ассистент кафедры оборудования и автоматизации химических производств ПНИПУ Дмитрий Кучев.

После создания конструкции трехмерной модели робота, ученые поэтапно смоделировали ее перемещение по двум последовательно расположенным отводам с радиусом поворота 1,5D и углом 90 градусов. Для этого они провели математические вычисления с использованием дифференциального уравнения Лагранжа (уравнение движения механической системы). Расчеты позволили определить траекторию движения конструкции и показали, что она перемещается беспрепятственно.
Ученые сообщают, что инновационная разработка робототехнического устройства уже используется при диагностике трубопроводов теплоснабжения в одном из городов России.