


Исследование опубликовано в журнале «Проблемы машиностроения и автоматизации». Разработка проведена в рамках программы стратегического академического лидерства «Приоритет 2030».
Вал – это деталь машины, предназначенная для передачи крутящего момента и восприятия действующих сил от расположенных на нем опор. Такие детали широко применяются в различных отраслях – в горнодобывающей промышленности, на производстве бумаги, пленки, металлической упаковки, текстиля, в полиграфии и других. Некоторые валы достигают массы до тонны, из-за которой их становится невозможно передвигать вручную. Многоэтапный технологический процесс хранения, обработки и перемещения таких валов по участку цеха отличается сложностью операций и трудоемкостью. Автоматизация с помощью робота-манипулятора значительно упрощает выполнение этих действий.
Одно из основных преимуществ моделирования производственного манипулятора – это возможность проводить тестирование и отладку его работы, не запуская реальное оборудование. Такой подход снижает риски и расходы, связанные с проведением реальных испытаний, позволяет определить проблемы и найти их решения еще до начала работы манипулятора в производстве. С помощью компьютерных моделей можно проанализировать, как различные факторы, например, длина и угол робота, скорость выполнения операции, влияют на производительность. Гибкость и точность этих систем позволяют снизить вероятность брака и повысить качество и скорость создания выпускаемой продукции. Кроме того, такой подход помогает улучшить безопасность работы операторов, а также экономит время и усилия.
Ученые Пермского Политеха разработали модель робота-манипулятора, который позволит автоматизировать процессы работы с крупногабаритными валами. «Манипулятор отличается от аналогичных моделей простотой изготовления основных узлов и обслуживания, надежностью механизмов, мобильностью, точностью движений. Его уникальность заключается в возможности точной настройки движений и высокой производительности», – говорит магистрант ПНИПУ, инженер-конструктор Дмитрий Каменских.
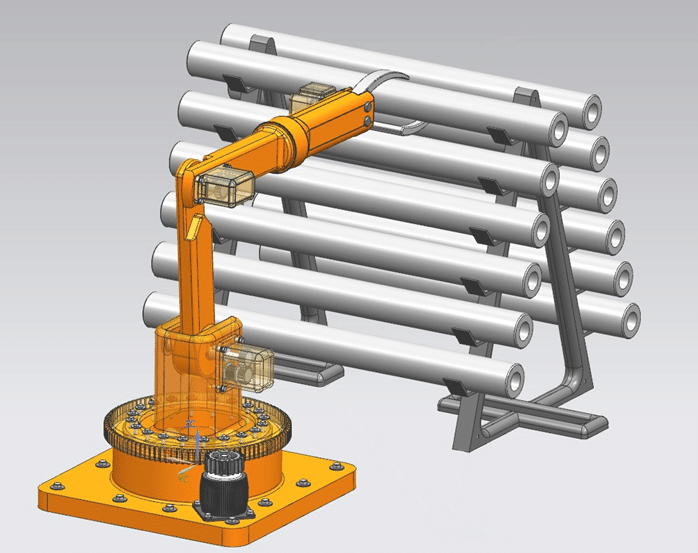
Конструкция устроена так. У производственного манипулятора есть «база» и три «плеча». «База» сопрягается с основанием путем центрирования внутренних пазов и перекатывания по направляющим с помощью подшипников. «Плечо» соединяется с ней при помощи валов. Каждое последующее «плечо» по такому же принципу соединяется с предыдущим. Второе и третье из них вращаются при помощи электродвигателя. У конструкции есть две лапы захвата, раскрытие и смыкание которых обеспечивается двумя валами-шестернями.
«Моделирование производственного робота играет важную роль в автоматизации технологического процесса обработки крупных валов. С помощью модели мы изучили и оптимизировали работу манипулятора, что при создании оборудования позволит достичь наилучших результатов. Модель имеет массу почти 2000 килограммов, при этом может перемещать валы массой до тонны», – объясняет доцент кафедры экономики и управления промышленным производством ПНИПУ Светлана Пономарева.
Ученые Пермского Политеха показали, что моделирование производственного манипулятора предоставляет ценные инструменты для улучшения эффективности и производительности промышленных процессов. В перспективе политехники планируют модернизировать предложенную модель посредством рельсового соединения, чтобы обеспечить ее перемещение по цеху от станка к станку. Сейчас ученые готовят документы на регистрацию патента по разработке.