


В статье, опубликованной в «Вестнике СГУГиТ», представлены наилучшие параметры для обучения модели с тем, чтобы обеспечить максимальную точность.
Для задач строительства, приватизации требуется регулярный мониторинг территорий. Ведут его, как правило, классическим методом. Сотрудники выезжают на место и проводят визуальный осмотр. Это отнимает много времени, сказывается нехватка персонала. Ученые из МФТИ и Кубанского государственного технологического университета предложили автоматизировать этот процесс.
Авторы работы приводят в пример реализацию закона о «гаражной амнистии» в Краснодаре. Согласно этого закона, граждане могут легализовать свой гараж и приобрести в собственность земельный участок под ним. Сейчас в работе департамента муниципальной собственности находится 7000 заявлений, люди ждут согласования документов от шести до 16 месяцев, в то время как регламент отводит на все месяц.
Ускорить процесс поможет съемка территории лазерным локатором (лидаром). Для распознавания объектов исследователи предложили использовать нейронную сеть PointNext, разработанную на основе PointNet++. Это программа с открытым кодом, написанная для работы с облаками точек лазерного отражения. Ее используют для сегментации, классификации и идентификации трехмерных объектов.
«Обычно нейросети используют для распознавания объектов на фото или видео, а PointNext работает с облаком точек лазерного отражения. Поэтому мы решили использовать ее», — пояснил Сергей Самарин, аспирант Физтех-школы радиотехники и компьютерных технологий МФТИ.
Лидар сканирует территорию лазерными импульсами, по времени их возвращения он определяет расстояние до объекта. В результате получается массив точек. Именно его и передают в нейросеть.
Но чтобы она выдала качественный результат, ее нужно обучить. Для этого используют эталонные наборы данных. В данном случае ученые воспользовались системой Terra_Maker, разработанной в Кубанском государственном университете. С ее помощью сгенерировали массив точек лазерного отражения участка размером 1000 на 1000 метров, где находится более 500 объектов недвижимости. Общее количество точек — более 4,7 миллионов. Все они были размечены на пять классов: земля, крыши зданий, низкая растительность, средняя растительность, высокая растительность.
Для оценки качества работы модели используют различные метрики, в первую очередь точность (accuracy), которая показывает долю верных ответов. Хорошая точность стремиться к 100 процентам (но не равна им). Чтобы получить максимальную точность, нужно правильно подобрать параметры работы нейросети. Именно эту задачу решали авторы исследования. Они перенастроили специально под нее PointNext и приступили к обучению.
Потребовалось 12 экспериментов, в результате которых определили оптимальное количество точек для одного обучаемого образца, размер сетки и количество эпох (когда через алгоритм проходит весь набор данных). В исследовании применяли функцию потерь CrossEntropy loss, оптимизатор Adam optimizer, экспоненциальное убывание скорости обучения (Step Decay).
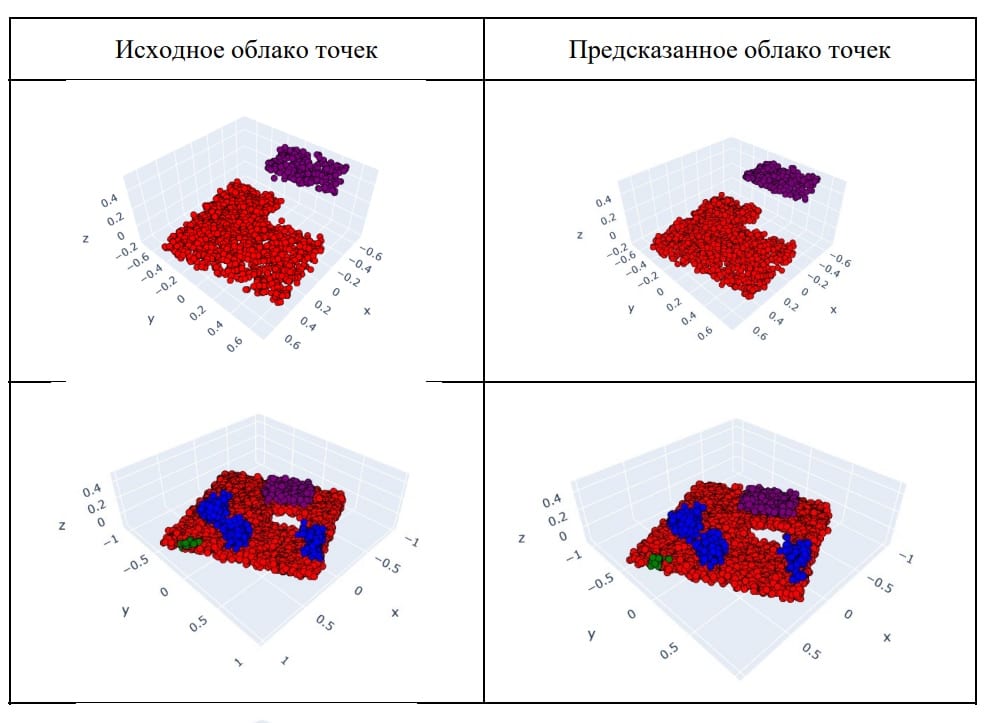
Результата работы нейросети представлен в виде трехмерных графиков с точками, покрашенными определенным цветом. Крыша здания, к примеру, сиреневая, высокая растительность — красная.
Наиболее точный результат получили при 2500 точек в одном обучающем образце и сетке 25 метров. В процессе обучения выявили закономерность — чем меньше сторона сетки и меньше точек в облаке, тем выше точность. Если добавить в датасет информацию о цвете, то точность несколько снижается, но не существенно. В целом, чем меньше параметров, тем более эффективно предсказывает модели. Наилучшая точность, полученная в эксперименте — 0,9998. Такой результат, близкий к единице, говорит об идеальном наборе данных, с которыми работала нейросеть. С реальным датасетом, где есть искажения и шумы, точность будет ниже.
Следующим шагом ученые намерены задействовать воздушное лазерное сканирование на реальных объектах с последующей камеральной обработкой данных нейросетью.
«Вместо того, чтобы тратить целый день на обход земельных участков, мы запускаем беспилотник с лидаром, делаем съемку. Чистим данные от шумов и отправляем в нейросеть. Она сегментирует и классифицирует данные так, что мы понимаем, где на территории есть здания, например, гараж», — поделился планами Сергей Самарин.
Эта работа важна не только для реализации закона о «гаражной амнистии», но также для выявления незаконного строительства, контроля за нарушениями при строительстве, например, соблюдении этажности, отступов от границ земельных участков.
(опубликовано при поддержке гранта Минобрнауки России в рамках федерального проекта «Популяризация науки и технологий» № 075-15-2024-571)