



Сегодня в мире есть два подхода к беспилотным авто — Tesla и всех остальных. Первый полагается на вождение исключительно по данным камер: нейросеть для этого обучается на вождении обычных людей, которые, как известно, смотрят на дорогу только в видимом диапазоне. Альтернативный подход опирается на дополнительные сенсорные системы. Чаще всего это лидары, дающие подробную 3D-картину дорожной обстановки.
Однако это решение весьма проблематично. Дело не только в том, что набор лидаров все еще стоит как бюджетное авто, но и в качественных недостатках. В частности, в туман и снег видимость для них падает примерно до нулевой. Человек все еще может что-то разобрать на дороге, а беспилотное авто с лидаром в таких условиях встанет. Другая сложность: поскольку люди-водители лишены лидаров, обучать нейросети использованию лидарных данных сложно, выборки малы, отчего часты галлюцинации. Так называют ситуации, когда нейросеть видит на дороге то, чего там нет, и предпринимает, например, фантомное торможение, то есть тормозит на пустой дороге, рискуя тем, что в машину под ее управлением въедут сзади.
Некоторые научные группы считают радары более разумной альтернативой. В отличие от лидаров, радарное излучение дает картинку и в непогоду, водяные капли относительно слабо поглощают радиоволны. Но поскольку их длина больше, чем у лидарного излучения, то данные от них меньшего разрешения, более разреженные. Кроме того, сигналы радаров в реальных дорожных условиях сталкиваются со множеством шумов, артефактов и нулем радиозаметной разметки на дорожном полотне. А без нее сложно обучать нейросети, способные управлять машиной, опираясь на радар. ПО для таких систем намного сложнее в разработке, чем, собственно, «железо».
Поэтому ученые из МФТИ разработали новую самообучающуюся систему обработки данных 4D-радаров RadarSFEMOS. Статью об этом опубликовали в журнале IEEE Robotics and Automation Letters. От предшественников система отличается более эффективным шумоподавлением, а также повышенной способностью определять направление и скорость движения объектов в окружающей среде. Это важно, поскольку в норме для радиолокации тем сложнее заметить движущийся объект, чем ближе его скорость к самой машине, на которой установлен радар Определение направления при этом происходит без специальной разметки.

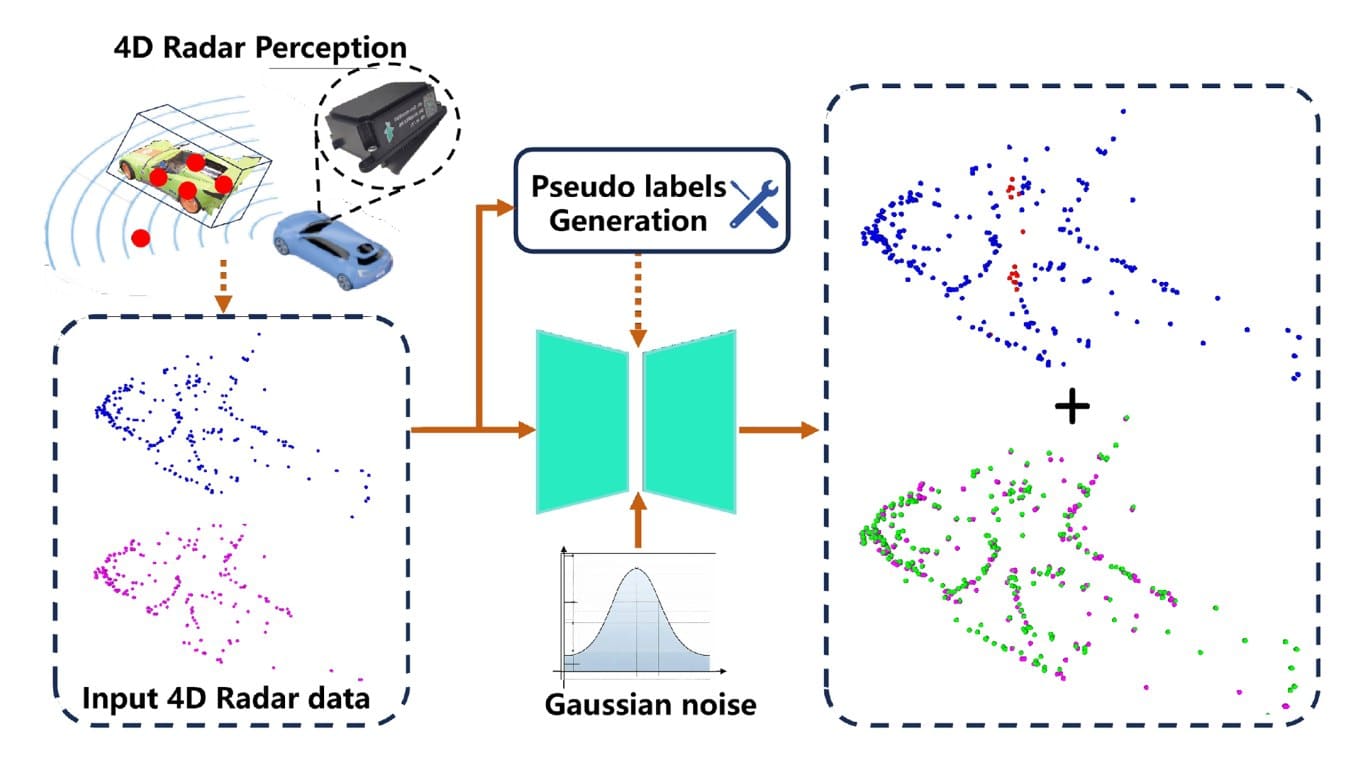
Для этого RadarSFEMOS применила диффузионную модель шумоподавления, очищающую радарные данные от шумов за миллисекунды. Чтобы идентифицировать предметы, окружающие радар, система применила трансформерный анализатор с адаптивной архитектурой. Это позволило различать объекты при всего 5-10 точках отражения радарных волн на квадратный метр проекции окружающих объектов. Лидарные системы на сегодня способны сделать это как минимум при сотне точек на квадратный метр.
Алгоритмы RadarSFEMOS также учитывает скорость своего автомобиля-носителя и вычитает его из скоростей окружающих объектов. 4D-радар научили измерять скорость движения объектов к автомобилю и от него. За счет внедрения ИИ система обучается без ручной разметки обучающего массива данных, постепенно «привыкая» отличать радарные шумы от реального движения и повышать точность своей работы.
«Наша система определяет движение объектов вокруг автомобиля и разделяет их на движущиеся и статичные, а также делает это в любых погодных условиях. Это как если бы беспилотник получил шестое чувство. Это не просто научная статья, алгоритм уже сегодня готов к работе на серийных радарах, которые в 50 раз дешевле лидаров», — описал итоги научной работы Степан Андреев, директор Научно-технического центра телекоммуникаций МФТИ.
Чтобы проверить способность RadarSFEMOS избегать фантомных торможений и иных реакций на несуществующие объекты, системы испытали на стандартных наборах данных View-of-Delft (VoD) и TJ4DRadSet. Число таких срабатываний упало в несколько раз, а точность определения положения объектов выросла до 89%.