


За счет своей конструкции квадрокоптеры обладают высокой маневренностью, однако для выполнения сложных движений в экспериментах, как правило, дополнительно используется внешняя система управления и позиционирования. Такая система, например, использовалась для испытаний однороторного асимметричного дрона и постройки веревочной переправы с помощью дронов.
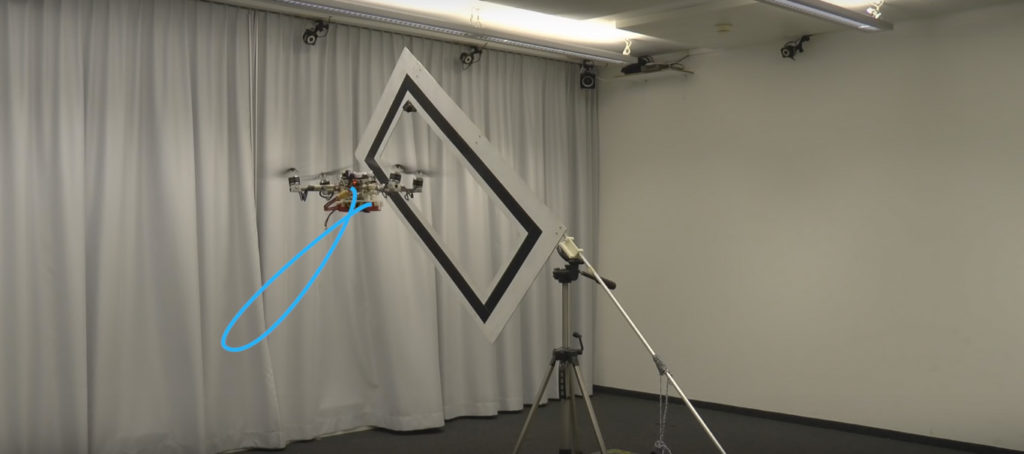
При этом внешние системы ограничивают применение имеющихся наработок. Чтобы сделать квадрокоптеры максимально независимыми, инженеры предложили использовать только показания акселерометра, гироскопа и бортовой камеры. В ходе демонстрации авторы испытали систему на базе одноплатного компьютера Odroid-XU4. Алгоритм корректировал полет дрона через прямоугольный проем.
Несмотря на то, что программное обеспечение позволяло рассчитать траекторию независимо от угла поворота окна, на практике ученые не превышали угол в 45 градусов. Это объяснялось относительно большим весом аппарата — 830 граммов, — который при прохождении через препятствие развивал скорость до трех метров в секунду. При этом отклонение дрона от траектории не превышало 10 сантиметров.
По подсчетам ученых, квадрокоптер совершил успешный полет в 80 процентах случаев. Ранее аналогичную технологию демонстрировали исследователи из Пенсильванского университета. Их система также использовала только собственные датчики и вычислительные возможности. Однако вес квадрокоптера в этом случае составлял 250 граммов, что позволяло ему выполнять более сложные задачи.