


Разработка проведена в рамках программы стратегического академического лидерства «Приоритет 2030». На исследования выданы патенты.
Современные композитные (состоящие из двух и более компонентов) SMART-материалы и конструкции основаны на использовании оптических волокон, материалов с памятью формы, пьезоэлектрических и/или магнитострикционных (меняющих форму при изменении намагниченности) материалов. Они применяются в системах самодиагностики, самозалечивания повреждений и адаптации к реальным условиям эксплуатации элементов аэрокосмической техники, антиобледенения и снижения уровня шума лопастей вертолетов, локации и настройки отражающих поверхностей оптических телескопов.
Наиболее ярким примером использования пьезоэлектрических элементов, обладающих прямым и обратным пьезоэффектами, является их перспективное применение в современной робототехнике в качестве «искусственной кожи» – гибких тактильных (сенсорных) индикаторных покрытий, голосовых акустических устройств и манипуляторов (актюаторов) захвата и перемещения предметов.
Пьезоэлементы, встроенные в SMART-конструкции, выполняют сенсорные и исполнительные функции. Сенсорные основаны на прямом пьезоэффекте, то есть, передают искусственному интеллекту электронную информацию о внешней среде. Исполнительные функции совершаются над внешними объектами и работают за счет обратного пьезоэффекта. В этом случае пьезоэлектрические элементы выступают в качестве «актюаторов» – преобразователей электрических сигналов от источника питания (искусственного интеллекта) в движение для манипулирования или сборки микромасштабных объектов, микрозахватов, шаговых двигателей, систем автоматического управления радиотехники, электроники, оптики, акустики, аэрокосмической и медицинской техники.

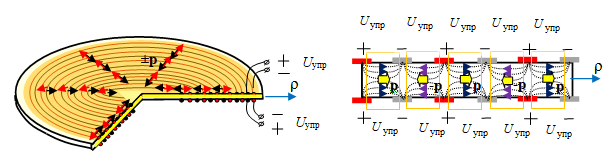
Ученые Пермского Политеха разработали два вида новых пьезоустройств – мембранные и оболочечные актюаторы, которым дали сокращенные названия: MDS — и CDS-актютаторы соответственно. DS означает использование в этих устройствах управляющих электродов в виде плоских или пространственных «двойных спиралей». Отличие новых актюаторов от прототипов заключается в значительно большей эффективности. Этот результат достигается за счет выбора именно спиральной формы управляющих электродов в виде «двойных спиралей», малости расстояния между витками спирали электродов и уникальной «взаимообратной» спиральной поляризации пьезослоя. Изготовление MDS- и CDS-актютаторов для широкого использования в науке и технике планируется осуществить в создаваемой учеными новой лаборатории «Пьезосенсортех» на аэрокосмическом факультете ПНИПУ.

«Разработанные нами актюаторы открывают новые перспективы расширения и совершенствования возможностей роботов. Их акустические системы – микрофоны и динамики, то есть «слух» и «голос», будут чувствительнее и громче, а манипуляторы, то есть «пальцы рук» – более ловкими, сильными. Кроме того, улучшится «осязание» – ощущение тепла, холода и производимого ими давления, возникающего при прикосновении, захвате и манипулировании предметом», – рассказывает профессор кафедры механики композиционных материалов и конструкций ПНИПУ, доктор физико-математических наук Андрей Паньков. Так, благодаря разработке пермских ученых, робототехника может шагнуть вперед, делая телескопы более точными, а роботов более чувствительными за счет использования новых актюаторов.