


Исследование опубликовано в журнале «Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления». Разработка проведена в рамках программы стратегического академического лидерства «Приоритет 2030».
По данным Федеральной службы государственной статистики, в России на 2023 год проживают почти 11 миллионов людей с ограниченными возможностями, из них 4,5 миллиона имеют третью степень инвалидности, когда ампутированы руки на уровне предплечья. Для помощи таким людям существуют бионические протезы. В последние годы они получают все большее распространение.
Бионические протезы считаются наиболее современными, они работают на электрическом приводе и способны частично или даже полностью выполнять функции утраченных органов. Ученые ПНИПУ рассмотрели крупнейшие компании на рынке и изучили параметры представленных протезов – максимальный ток, емкость аккумуляторов, показатели циклов сжатия-расжатия кисти, усилие при захвате, диапазон температуры при эксплуатации, вес, который они могут выдерживать. Выяснилось, что сейчас основное направление для научных исследований – это разработки в области систем считывания данных с организма пациента. При этом крайне мало внимания уделяется задействованным в проектировании приводам.
Большинство разработок электродвигателей ограничиваются выбором готовых продаваемых вариантов, поскольку индивидуальные увеличивают и так большую стоимость протеза. Ученые ПНИПУ нашли способ оптимизировать электродвигатели внутри бионического протеза. Новое решение позволит отказаться от используемых сейчас цепочек, состоящих из нескольких двигателей и механических передач, которые усложняют конструкцию, делают ее тяжелой, добавляют механические шумы, увеличивают вероятность поломки.
Политехники предлагают заменить существующую систему на линейные и сферические двигатели. Первый из них помогает элементам менять положение в одном направлении, например, чтобы поднять груз или открыть крышку. Второй – обеспечивает движение в нескольких плоскостях.
Для внедрения разработки политехники изучили точки применения двигателей, которые уже используются по старой схеме и нуждаются в новом технологическом решении. Среди них выделили три основных.
Первая точка – обеспечение подвижности пальцев. Сейчас в протезах эта цель достигается с помощью традиционного вращающегося двигателя и передаточного механизма – актуатора, который трансформирует вращательное движение в линейное. Это приводит к недостаточной эффективности использования ограниченного внутреннего пространства протеза, увеличению его веса и уменьшению срока работы.
Ученые Пермского Политеха рассматривают вариант замены его сразу на линейный двигатель. Он может быть плоским и цилиндрическим, первый – более компактный, при этом второй предпочтителен из-за замкнутого магнитопровода, который в режиме жесткой экономии энергии позволяет увеличить срок автономной работы протеза.
Вторая точка применения электродвигателя – это обеспечение подвижности кисти в целом, а именно имитация запястья и мышц, отвечающих за наклоны. Третья – основание противостоящего пальца (большого), которому нужно двигаться в двух плоскостях. В этих случаях политехники предлагают заменить двигатель на сферический, который отличается возможностью обеспечить сразу две функции – вращение вокруг оси и наклоны относительно нее.
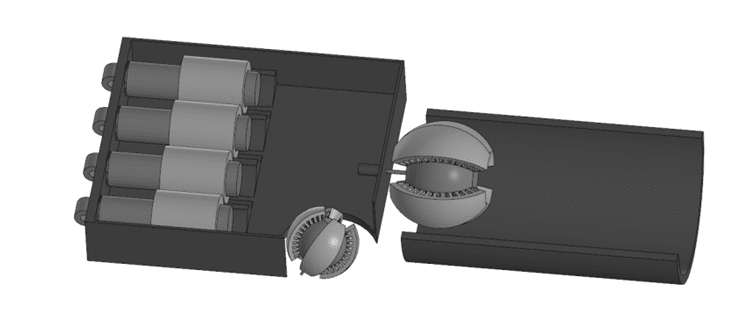
«На основе этих предложений мы сформировали свой вариант расположения предлагаемых двигателей в корпусе протеза: цилиндрические и линейные двигатели предполагается использовать для движения четырех пальцев, а сферические – для кисти и большого пальца. Затем мы провели расчеты и представили схему компоновки электропривода протеза, которая уменьшит вес и шум конструкции, а также обеспечит ее отказоустойчивость», – объясняет ведущий инженер кафедры электротехники и электромеханики ПНИПУ Александр Плюснин.
Для замены применяемых сейчас линейных актуаторов ученые провели расчеты и определили параметры питания, которыми должны обладать будущие двигатели. Они рассчитываются исходя из емкости предполагаемого аккумулятора, на современных моделях она составляет около 1500 мАч.
У каждого двигателя политехники определили токопотребление – для подвижности пальцев необходимо 0,4 А, а для запястий – 0,8 А. Предполагается, что при работе всех двигателей одновременно потребляемый ток составит 4,48 А. Тогда емкости стандартного аккумулятора хватит примерно на 1200 полных циклов перемещения.
«Нам было важно показать, что замена применяемых сейчас двигателей целесообразна только в том случае, если новые двигатели будут иметь или очевидные преимущества с перспективой стать полноценной заменой, или частичные преимущества, став альтернативным, но тоже перспективным решением. Согласно проведенным исследованиям предложенный вариант может претендовать на то, чтобы удовлетворить указанным требованиям», – говорит заведующий кафедрой электротехники и электромеханики ПНИПУ Борис Кавалеров.
Ученые ПНИПУ предложили новый, оптимизированный вариант электропривода протеза. Предложенное решение позволит уменьшить вес и объем, отводимый в протезе под двигательную систему, сделает его тише, улучшит компоновку и оптимизирует энергопотребление. Политехники отмечают, что полученные результаты могут быть использованы не только в протезировании, но и при разработке манипуляторов роботов-андроидов.