


Система адаптивной оптики позволяет фокусировать внимание телескопа на своей цели в течение 60 секунд.
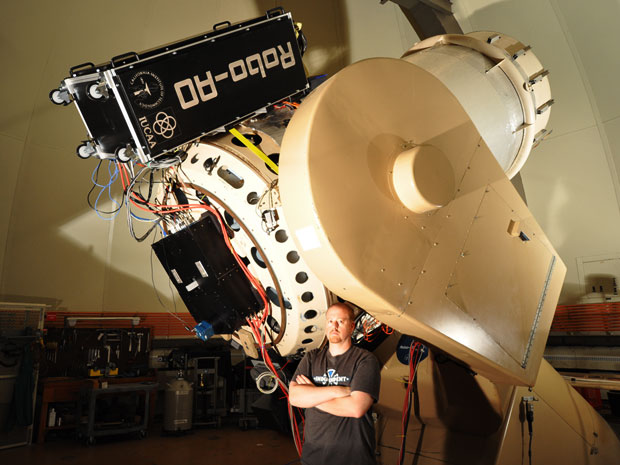
За созданием Robo-AO стоит группа ученых из разных уголков мира. Robo-AO стал первым в мире комплексом, объединившим систему адаптивной оптики с системой автоматического наблюдения.
По мнению специалистов, такой комплекс позволит получать изображения, не уступающие по качеству снимкам, отправленным с телескопа Хаббл. При этом стоимость Robo-AO составляет 1 млн долларов, что несравнимо с ценой космических телескопов. Робот-телескоп можно подключить к любому телескопу, диаметр зеркала которого достигает от 1 до 3 м.
var params = {«playlist»:[{«title»:»Телескоп Robo-AO за работой. Таймлапс»,»posterUrl»:»https://i.ytimg.com/vi/HN_jdJflfv0/maxresdefault.jpg»,»video»:[{«url»:»http://www.youtube.com/watch?v=HN_jdJflfv0#t=46″}],»duration»:0}],»uiLanguage»:»ru»,»width»:727,»height»:409,»design»:{«skinName»:»islands»,»color»:{«scheme»:»dark»,»buttonBg»:»#333333″,»buttonNormal»:»#FFFFFF»,»buttonHover»:»#4FA9B8″}}}; player.embed(params);
В настоящий момент комплекс проходит испытания в обсерватории Паломар. Уже сейчас Robo-AO позволил провести детальное наблюдение 715 экзопланет-кандидатов. Вдохновившись первыми результатами, ученые решили накопить средств для строительства другого такого комплекса.
Дальнейшей целью использования Robo-AO станет наблюдение за более чем 4 тыс. экзопланет-кандидатов, обнаруженных телескопом Kepler.
Экзопланеты имеют небольшие размеры и довольно тусклы на фоне звезд. В силу этого задача их обнаружения всегда представлялась довольно сложной. На сегодня подтверждено существование 1810 экзопланет.
var params = {«playlist»:[{«title»:»Robo-AO проводит наблюдения «,»posterUrl»:»http://cdn.phys.org/newman/gfx/news/hires/2014/1-laserwieldin.jpg»,»video»:[{«url»:»http://www.youtube.com/watch?v=W4wqFTwiCro»}],»duration»:0}],»uiLanguage»:»ru»,»width»:727,»height»:409,»design»:{«skinName»:»islands»,»color»:{«scheme»:»dark»,»buttonBg»:»#333333″,»buttonNormal»:»#FFFFFF»,»buttonHover»:»#4FA9B8″}}}; player.embed(params);