


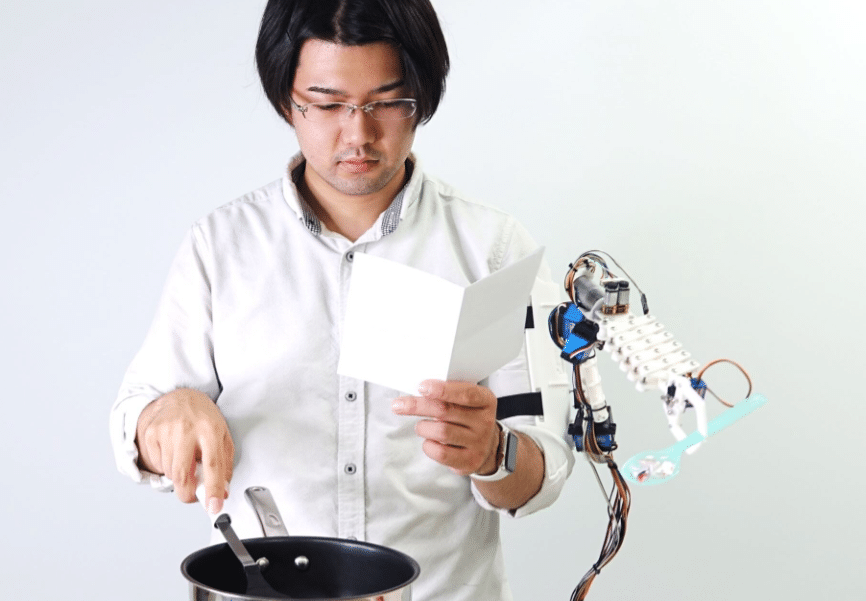
Инженеры из Японского передового института науки и технологий и Токийского университета создали AugLimb — роботизированную конечность, которая станет помощником в повседневных делах. Согласно заметке, опубликованной на портале arXiv.org, за счет ножничного механизма «третья рука» может увеличиваться и быть как минимум в два с половиной раза длиннее предплечья, а также захватывать объекты в непосредственной близости от человека.
Носимые роботы-манипуляторы в основном фиксируются на верхней части тела пользователя — на плечах или талии, — и хотя некоторые подобные системы оказались многообещающими, они громоздки. Команда Хаорана Се, напротив, предлагает компактную роботизированную руку, которая способна складываться в несколько раз и никак не мешать человеку даже при продолжительном использовании.

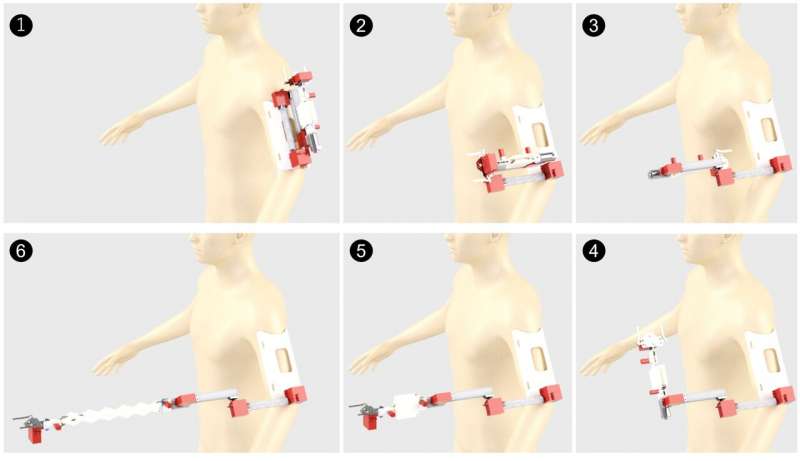
AugLimb наделили семью степенями свободы (совокупность независимых координат перемещения и/или вращения) и небольшим весом — следовательно, ее смогут носить даже дети и пожилые люди. Кроме того, конечность можно легко напечатать при помощи 3D-принтера.

Разработчики уверены, что «третья рука» вскоре станет модным аксессуаром вроде умных часов и будет полезна в ситуациях вроде приготовления ужина или уборки — это задачи, для выполнения которых нужно манипулировать множеством объектов. Также AugLimb пригодится хирургам, строителям, продавцам и другим специалистам.
Но пока роботизированная конечность — на стадии прототипа. Инженеры продолжают тестировать ее, чтобы сделать как можно более удобной для повседневной жизни.
«Мы планируем изучить эффективные способы управления AugLimb с помощью биологической обратной связи, например сигналов электромиографии от мышц (способ диагностики активности мышечной ткани. — Прим. ред.) или электроэнцефалограммы (графическое изображение, получаемое при регистрации колебаний электрических потенциалов головного мозга через череп. — Прим. ред.)», — рассказал Хаоран Се, добавив, что для улучшения анализа сигналов хотят задействовать методы машинного обучения.