


У подобных аппаратов, отметили инженеры-робототехники, большой прикладной потенциал: их будут все чаще использовать в научных целях, в военных операциях или при обслуживании промышленной инфраструктуры. Для этого беспилотники должны уметь преодолевать значительные расстояния, сохраняя возможности точного маневрирования или удержания на месте.
Например, такие требования предъявляют к дронам, инспектирующим подводные нефтяные трубопроводы. В их задачи входят достижение удаленных установок, точное позиционирование и лавирование при выполнении ремонтных работ. Однако по своим характеристикам современные версии мини-«наутилусов» пока сильно уступают летательным беспилотникам, хотя они дешевле в строительстве и эксплуатации.
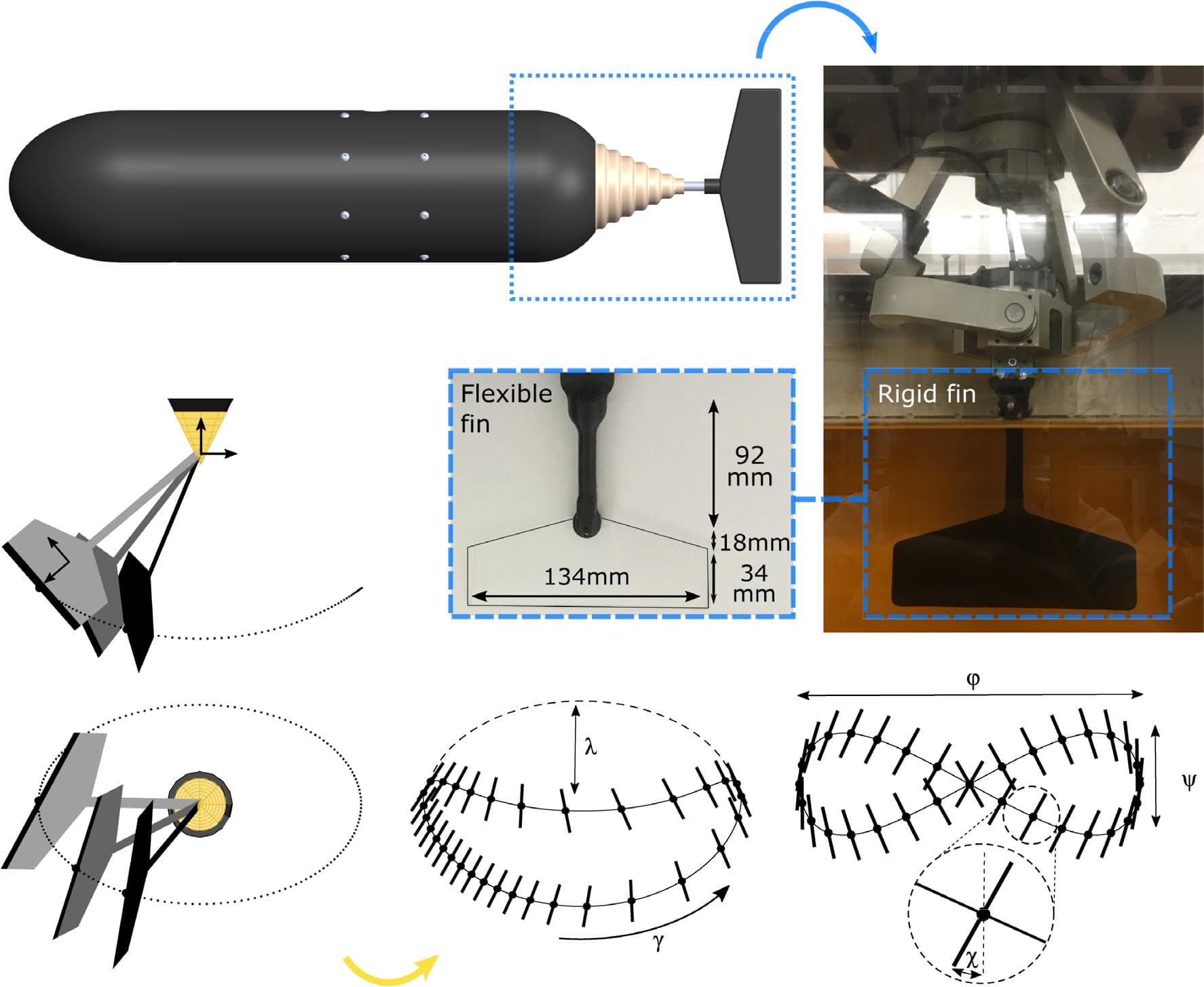
Создавая свой прототип роботизированного плавника, исследователи учли как биологические особенности рыб, так и уже разработанные человеком механизмы. Гибридный гребной движитель воссоздает трехмерную кинематику хвостового плавника представителей вида тунцовых. Этот орган выступает в качестве того же движителя, а также стабилизатора и руля, обеспечивая рыбе курсовую устойчивость и маневренность.
Предлагаемый плавник-пропеллер состоит из трех осей и располагается в задней части транспортного средства. Движение плавника генерируется сферическим манипулятором и выполняется либо по траектории восьмерки, либо эллипса. Это повторяет подметающие и вращательные гребки рыб, влияющие на скорость и изворотливость. Судя по полученным экспериментальным данным, трехмерная кинематика повышает маневренность на 49% по сравнению с двумерной, то есть предполагающей только прямолинейные маховые движения. При этом механизм эффективен для широкого диапазона геометрии и жесткости плавника.
Новый прототип, в отличие от существующих аппаратов, способен сочетать две задачи — выполнять дальние миссии, а также удерживаться и маневрировать на месте. До сих пор подводные беспилотники специализировались на чем-то одном. Правда, предлагаемый механизм делает это не одновременно, а последовательно.

Ученые планируют усовершенствовать конструкцию, сделав «плавник» еще более обтекаемым и тихим, а затем испытать его. С помощью плавных, быстрых и тихих движений оснащенный им беспилотник сможет эффективнее исследовать глубокие воды.
Научная работа опубликована в журнале Scientific Reports.